
Ostatnio powrócił problem dotyczący oznaczenia miejsca zdarzenia Landing (TAWS#38) w czasie podchodzenia samolotu TU154M nr 101 do lądowania w Smoleńsku. Najważniejsze odczytane przez inżynierów z UASC dane tego zdarzenia są następujące:
Present Position Latitude 54.825022 deg,
Present Position Longitude 32.054838 deg
Według mnie dane te należy rozpatrywać łącznie z danymi odczytanymi z pamięci systemu FMS, związanymi z momentem zamrożenia wykonywania obliczeń, tuż przed rozbiciem się samolotu o ziemię. Nie mamy pełnego opisu algorytmów pracy systemów FMS, natomiast z tego, co przedstawiła korporacja UASC w swoim raporcie i innych dokumentach wynika, że w przypadku tych systemów mamy do czynienia z trzema rodzajami obsługiwanych danych:
- dane wejściowe;
- dane statusowe;
- dane wyjściowe.
Algorytm pracy systemu wygląda w przybliżeniu w ten sposób, że dane z kilku urządzeń pomiarowych: GPS, żyroskopów TKS-P2 i innych są integrowane przez filtr Kalmana i na tej podstawie powstaje informacja statusowa o położeniu samolotu w poziomie. Informacja statusowa o położeniu w pionie i inne dane aerodynamiczne pochodzą z komputera danych aerodynamicznych WBE-SWS. Dane o położeniu poziomym służą systemowi FMS do wyliczania analogowych danych sterujących, przekazywanych do ABSU:
Z- линейное боковое уклонение от траектории полета;
ЗПУ - заданный путевой угол частной ортодромии;
ϒзад - заданный крен самолета.
Obok tego wyliczana jest także bieżąca informacja o położeniu samolotu, która jest przekazywana interfejsem ARINC-429 do systemu TAWS.
Informacja z systemów GPS podawana na wejście systemów FMS pojawia się co 1 sekundę, natomiast informacja przekazywana do systemu TAWS wg normy ARINC-429 powinna być wysyłana co 100ms. Te niewielkie odstępy czasowe w przekazywaniu danych wyjściowych wynikają z istotnego znaczenia tych danych oraz z tego, że interfejs zgodny z ARINC-429 z natury służy do tworzenia połączeń typu: jeden do wielu. W takim przypadku nie ma prostej metody organizacji sprzężenia zwrotnego, dzięki któremu można by było wykryć, czy informacja dotarła do wszystkich odbiorców bez przekłamań. Z tego powodu stosuje się wielokrotne wysyłanie informacji w krótkich odstępach czasowych bez czekania na potwierdzenie pozytywne lub negatywne od odbiorcy, licząc na to, że za którymś razem zostanie dostarczona bez przekłamań. Norma ARINC-429 zawiera zalecanie, aby kolejne wysyłane komunikaty zawierały zaktualizowane dane, ale nie jest to bezwzględny nakaz – decyzja o zastosowaniu takiego rozwiązana należy do projektantów systemów.
Analizując dostępne informacje można dojść wniosku, że w przypadku systemów FMS firmy UASC wszelkie informacje o położeniu samolotu wypracowują te właśnie urządzenia, ekstrapolując co 100 ms informację statusową i umieszczając wynik ekstrapolacji na swoim wyjściu. Systemy TAWS nie przeprowadzają już żadnych obliczeń pozycji, a jedynie korzystają z najnowszych danych otrzymanych z systemów FMS.
Łączne zestawienie danych o teoretycznej trajektorii poziomej samolotu, punktach kolizji z przeszkodami i rozkładzie szczątków wg danych z raportu KBWLL przedstawia rysunek 1, a wg raportu MAK rysunek 2. Należy od razu wyjaśnić, że oba rysunki różnią się konwencją układu osi poziomej i pionowej, tak jak to na rysunkach opisano.
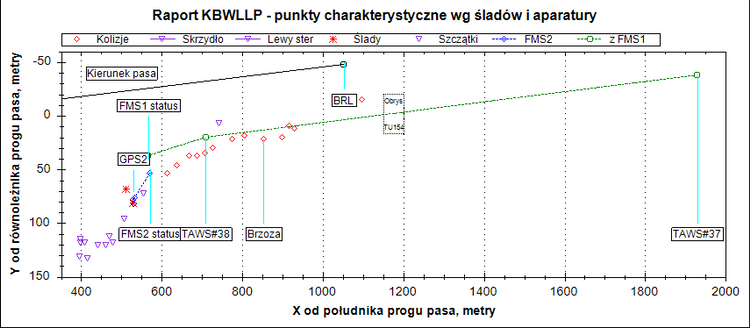
Rysunek 1 (uzupełniony). Punkty charakterystyczne lotu wg raportu KBWLLP
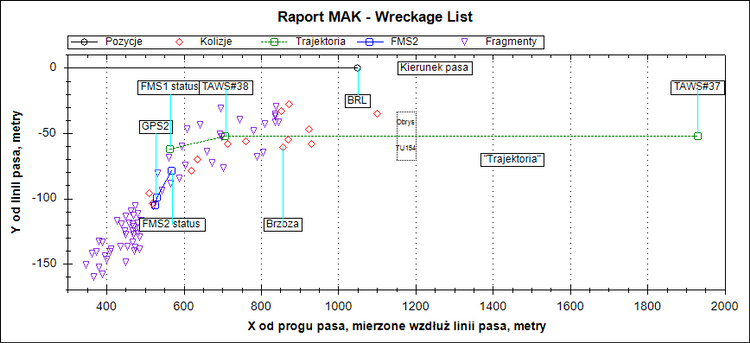
Rysunek 2 (uzupełniony). Punkty charakterystyczne lotu wg raportu MAK
Dane do wykresów pochodzą z dwóch różnych pomiarów, wykonanych różnymi przyrządami i z tego wyniknęły pewne różnice w układzie punktów. Jak widać w obu przypadkach widoczne są jednak dwa problemy:
- w okolicy zdarzenia TAWS#38, obiekt z którym samolot zderzył się swoim podwoziem prawdopodobnie znajdował się na południe od hipotetycznej trajektorii samolotu, to jest trudne do zinterpretowania, skoro samolot był przechylony na lewą stronę;
- wg danych z systemu FMS1 samolot leciał gdzieś lekko na północ, gdzie później nie znaleziono jego szczątków.
Ostatnie wartości kursu magnetycznego odnotowane przez rejestratory MSRP-64 przed kolizją z feralną brzozą wynosiły najpierw 259°, a potem do godziny 8:41:00.094 260°. Z połączenia linią prostą punktów TAWS#37 i TAWS#38 wynika natomiast kurs geograficzny 267.3°. Mamy też następującą informację o deklinacji magnetycznej w okolicy:
FMS2 Output Magnetic Variation (L147) E 7.73°
FMS2 Status Magnetic Variation E 7.61°
Ze względu na ograniczenie rozdzielczości zapisu kursu przez rejestratory do 1°, można uznać, że w tej fazie lotu obie metody oznaczenia kursu dają zgodne wyniki. Potem jednak pojawiają się niezgodności:
- kurs magnetyczny zapisywany przez rejestratory zmienia się o godzinie 8:41:00.594 na wartość 254°;
- system FMS2 odnotowuje utratę kontaktu ze swoim system TKS-P2 przy wartości:
FMS2 Status: Magnetic Heading Not Valid. Last known heading value was 267.1° (czyli około 259.5° liczone jako kurs magnetyczny),
FMS2 Input: Heading Status Analog heading input not available Last Known Heading Value (magnetic referenced) 259.5°;
- system FMS1 odnotowuje utratę kontaktu ze swoim systemem TKS-P2 przy wartości FMS1 Status widocznej na szynie “Cross-fill bus”:
Heading No Computed Data Last known heading value was 264.8° (czyli około 257.2° liczone jako kurs magnetyczny).
Utrata kontaktu systemów FMS z żyroskopami TKS-P2 mogła wynikać z tego, że urządzenia te pracują poprawnie przy kątach przechylenia nie większych niż około 55° do 58° - mogła zatem zadziałać wbudowana w system blokada. Nie można wykluczyć jednak tego, że była rezultatem uszkodzeń linii sygnałowych łączących TKS-P2 i FMS, które pojawiły się w chwili zerwania przez samolot linii energetycznej.
Z przedstawionego zestawienia wynika, że system FMS2 utracił kontakt ze swoim żyroskopem TKS-P2 wcześniej niż system FMS1. Dzięki temu wcześniej przestawił się na dane pochodzące z systemu GPS i pokazał bardziej wiarygodne położenie samolotu w ostatniej fazie lotu. System FMS1 współpracował ze swoim żyroskopem TKS-P2 dłużej, ale przez to zrobił złą ekstrapolację położenia końcowego. Problem ten był już analizowany dawno temu przez Forda Prefekta w jego notce:
http://ford.salon24.pl/438937,dokad-lecial-fms-pierwszego-pilota
Zasadniczym pytaniem odnośnie punktu, w którym zaszło zdarzenie Landing (TAWS#38) odnotowane przez system TAWS jest to, czy dane tego punktu wyliczone przez system FMS1 są prawidłowe, czy też są błędne, podobnie jak położenie punktu FMS1 Status. Jak można zobaczyć na rysunku 3, w chwili zdarzenia TAWS#37 kurs magnetyczny był bliski 252°, a system FMS1 nadal posiadałostatnią wartość równą około 257.2°. Wszystko wskazuje na to, że „nie uwolnił” się od zależności od tej wartości aż do końca lotu, bo miejsce zamrożenia odnotowane w jego statusie jest niewiarygodne. Z tego wynika wniosek, że niestety także współrzędne zdarzenia TAWS#38 są błędne – wyliczono je nie mając prawidłowego kursu magnetycznego z TKS-P2 i nie nastąpiło jeszcze przejście na wyłączne stosowanie danych z GPS, tak jak to miało na końcu miejsce w przypadku systemu FMS2.
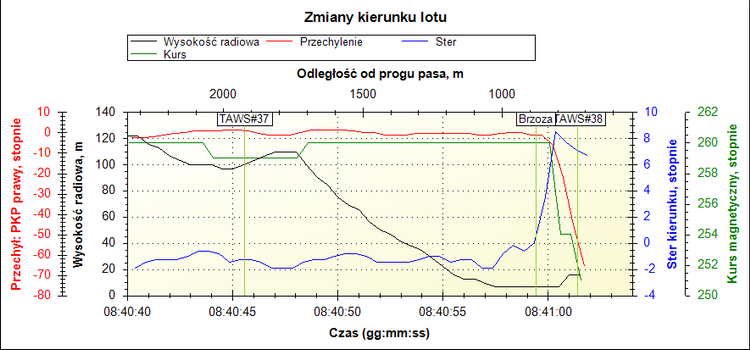
Rysunek 3. Wykres zmian kursu magnetycznego
14.06.2017 - Zgodnie z sugestią you-know-who dodałem do rysunków 1 i 2 obrysy sylwetki samolotu Tu154M






Komentarze
Pokaż komentarze (12)