
W raporcie MAK można znaleźć informację o konfiguracji systemów nawigacyjnych samolotu PLF 101 w Smoleńsku w postaci kilku rysunków, między innymi przytoczonym tu rysunkiem 1.
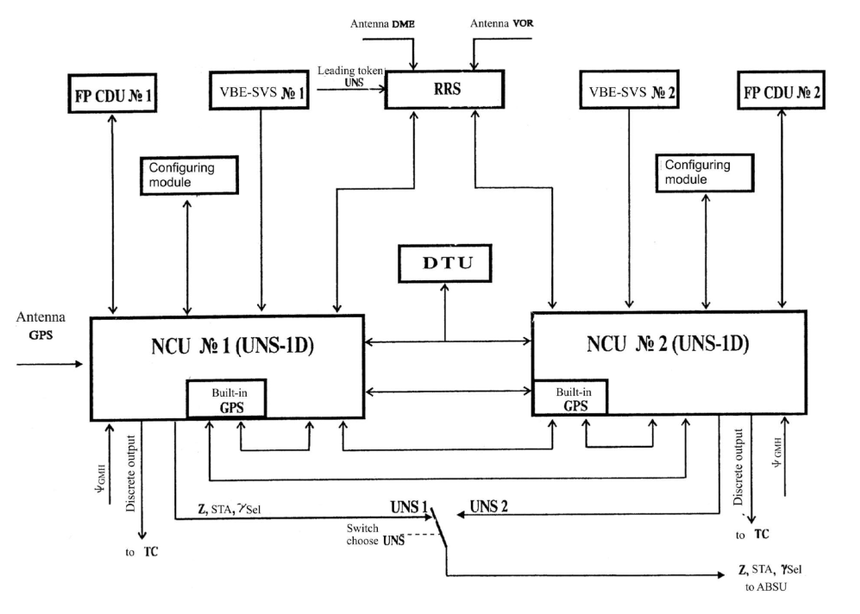
Rys 1. Konfiguracja systemów nawigacyjnych w samolocie TU154M nr PLF101 wg raportu MAK
Na rysunku tym i w dalszym ciągu notki wprowadzono rozróżnienie, wg którego NCU to komputer nawigacyjny składający się z kilku modułów, a FMS to centralny moduł NCU.
Bloger Tiger65 udostępnił w swoich komentarzach linki do istotnych fragmentów dokumentacji technicznej systemów NCU i TAWS, które pozwalają uzupełnić dotychczas opublikowane na tym forum informacje o kilka szczegółów przedstawionych na rysunku 2. Rysunek ten przedstawia powiązania NCU z jego otoczeniem technicznym w samolocie TU154M. Pominięto przy tym drugi system NCU oraz urządzenie o nazwie DTU100 do wprowadzania programów i danych do systemów NCU/TAWS. Przedstawiono tylko jeden system NCU, bo drugi jest taki sam. Warto jednak wiedzieć, że w ostatniej fazie lotu istniał podział funkcji obu systemów:
- system NCU 1 współpracował z systemem TAWS;
- system NCU 2 współpracował z systemem ABSU.
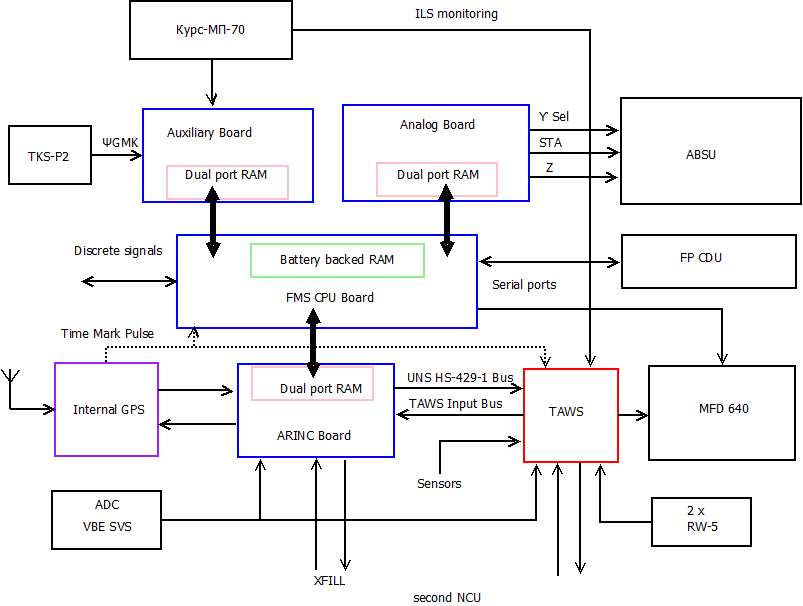
Rys 2. Dokładniejsza konfiguracja urządzeń nawigacyjnych samolotu
Skróty zastosowane na rysunku oznaczają:
- ABSU jest głównym system sterowania samolotu;
- System Kurs-MP70 dostarcza sygnałów z systemów: VOR/DME/ILS;
- Urządzenie TKS-P2 to inercyjny system nawigacyjny samolotu TU154M, którego zasadniczą częścią są żyroskopy GA-3 oraz kompasy magnetyczne ID-3;
- ADC VBE-SVS to rosyjski komputer danych aerodynamicznych;
- Urządzenia RW-5 to są radiowysokościomierze.
W skład samego NCU wchodzą następujące moduły:
- FMS CPU Board;
- Auxiliary Board;
- Analog Board;
- ARINC Board ;
- Internal GPS.
Moduł FMS ma procesor typu Z8001 taktowany zegarem 10 MHz. Pozostałe moduły mają procesory typu M68332 taktowane zegarami o częstotliwości 16 (lub co najwyżej 20) MHz.
Z drugim, trzecim i czwartym modułem procesor modułu FMS współpracuje poprzez pamięci (dual port RAM) znajdujące się na płytach tych modułów. Zwraca uwagę to, że procesor FMS może sięgać do pamięci modułów wejścia/wyjścia, ale procesory tych modułów nie mogą sięgać do pamięci modułu FMS. W szczególności dotyczy to pomięci podtrzymywanej przez baterię. Wniosek taki daje się wyciągnąć z raportu UASC – gdyby taka możliwość istniała, z całą pewnością istniejący interfejs zostałaby wykorzystany do odczytu stanu podtrzymywanej przez baterię pamięci systemu FMS 1 nr 1577.
Moduł Analog Board jest odpowiedzialny za wysyłanie do systemu sterowania samolotu ABSU następujących sygnałów:
Z = Z - линейное боковое уклонение от траектории полета ;
STA = ЗПУ - заданный путевой угол частной ортодромии ;
YSel =ϒ зад - заданный крен самолета.
Ten układ sygnałów różni się od standardowych możliwości systemu UNS-1D, jest także nieco inny niż w przypadku, gdy nawigacją sterował oryginalny rosyjski komputer nawigacyjny NWU-BZ. W szczególności widać, że NCU nie wyprowadza sygnału Z’, to jest prędkości zmian odchylenia poziomego, za to od razu wyprowadza sygnał ϒ зад, który w oryginalnej konfiguracji z NWU-BZ był tworzony w ABSU na podstawie sygnałów Z i Z’. Prawdopodobnie do wyprowadzenia sygnału ϒ зад wykorzystano jedno z wyjść, które w oryginale było używane do sterowania ruchem samolotu w kierunku pionowym.
W dokumentach UASC dotyczących sposobu pracy systemów FMS napisano, że system ten używa wszystkich dostępnych informacji z wejść do wypracowania tzw. Best Computed Position (BCP) przy zastosowaniu algorytmu nazywanego filtrem Kalmana. Można założyć, że ta BCP jest przechowywana w statusie systemu FMS i potem służy do wypracowania sygnałów wyprowadzanych stopniowo (z zapewnieniem unikania gwałtownych skoków) na wyjścia analogowe i cyfrowe systemu.
„Internal GPS” jest niezależnym urządzeniem współpracującym z resztą systemu NCU poprzez łącza transmisyjne ARINC 429. Określenie „internal” pochodzi stąd, że znajduje się w tej samej obudowie i korzysta ze wspólnego zasilacza.
Funkcjonowanie odbiorników GPS jest określone w normie ARINC 743A. Stanowi ona, że po odebraniu sygnałów z satelitów odbiornik ma czas nie dłuższy niż 500 ms na wyliczenie wszystkich parametrów i przygotowanie z nich paczki o nazwie "SV Solution". Po zakończeniu obliczeń odbiornik sprzętowo wprowadza impuls "Time Mark", a po nim na łączu ARINC 429 paczkę "SV Solution" , na której końcu jest umieszczany komunikat L150, w którym jest podany czas UTC, identyfikujący moment wystawienia impulsu "Time Mark" z dokładnością do 1 sekundy. Jeśli potrzebna jest większa dokładność, to przed tym komunikatem powinny być wysłane komunikaty L140 (podający ułamkową część sekundy z dokładnością do 1 mikrosekundy) i L141 (podający ułamkową część sekundy z dokładnością do 1 nanosekundy). Przesyłanie paczki "SV Solution" musi się zakończyć nie później niż po 200 ms od momentu wystawienia impulsu "Time Mark". Zależności te przedstawiono na rysunku 3.
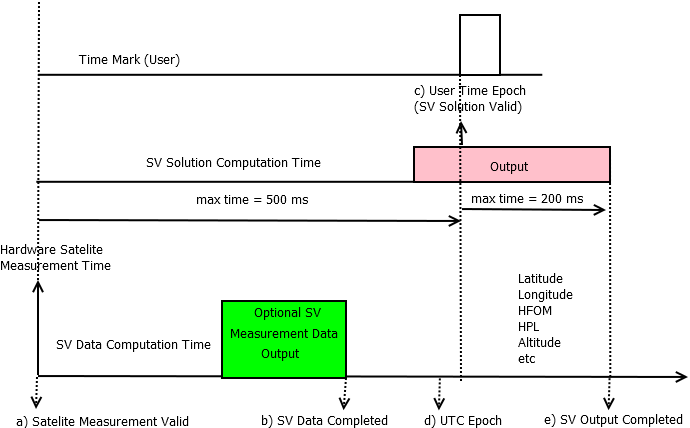
Rys 3. Zależności czasowe w odbiorniku GPS wg normy ARINC 743A
Nie jest całkowicie jasne, jak synchronizowane są zegary systemów FMS z czasem otrzymywanym z systemu GPS. Ponieważ zawsze istnieje możliwość, że sygnał z satelity nie dotrze od odbiorników w samolocie systemy FMS/TAWS muszą mieć własne zegary. O tym, że konstruktorzy poważnie liczyli się z możliwości utraty informacji z GPS świadczą bardzo rozbudowane procedury RAIM i RAIM Prediction w urządzeniach GPS i mechanizmy do wykrywania i zarządzania takimi sytuacjami. Generalnie w takiej sytuacji FMS posługuje się własnym zegarem (układ RTC) oraz danymi nawigacyjnymi z systemu inercyjnego TPS-P2 i innymi (VOR, DME/TACAN).
Komunikaty L150 wysyłane raz na sekundę przez system FMS do TAWS nie pochodzą wprost z odbiorników GPS. Można się o tym przekonać rozkodowując wartość pokazaną w raporcie UASC w "Table 3-6 Serial Number 281 Digital Outputs". Bit 11 ma tam wartość 0, co wg normy ARINC 743A oznacza, że komunikat nie pochodzi z systemu GPS, czyli że jest generowany wewnętrznie przez system FMS. Nie wiadomo, czy w związku z tym istnieje jakiś sygnał sprzętowy, służący do synchronizacji czasów FMS i TAWS.
Na rysunku 2 przedstawiono teoretycznie możliwe do zrealizowania połączenie sygnału „Time Mark” dostarczanego przez „Internal GPS”, z systemami FMS i TAWS. Tego, czy praktycznie połączenie to zrealizowano nie udało się ustalić – z dokumentacji NCU wynika tylko tyle, że sygnał ten jest fizycznie dostępny na zewnętrznym złączu systemu. Dostępność tego sygnału może ułatwiać stabilizację częstotliwości używanych przez zegary RTC do odmierzania czasu, nie jest to jednak równoznaczne z synchronizacją momentów, w których zegary w systemach zmieniają wartość na pozycji sekund. Do takiej synchronizacji potrzebne by były przesyłane z GPS komunikaty L140 i L141, dokładniej informujące o wielkości przesunięcia impulsu "Time Mark" w stosunku do czasu UTC. Dostępne dokumentacje urządzeń GPS nie specyfikują wysyłania tych komunikatów ani przez urządzenie "Internal GPS" ani przez zewnętrzne urządzenie GPS-1000.
Złącze transmisyjne zgodne z normą ARINC 429 nie gwarantuje, że wysłane dane z nadajnika zostaną poprawnie odebrane przez odbiornik. Ponadto są to łącza jednokierunkowe - w ramach pojedynczego łącza nie ma sprzężenia zwrotnego pozwalającego na pokazywanie jak odebrano dane poprzez wysłanie komunikatów ACK lub NAK. W tej sytuacji, w łączu stosuje się automatyczne powtarzanie wszystkich komunikatów. Przykładowo komunikaty pokazujące pozycję samolotu L110 (GPS Latitude) + L120 (GPS Fine Latitude) oraz L111 (GPS Longitude) + L121 (GPS Fine Longitude) przesyłane są z wewnętrznego urządzenia GPS do systemu FMS tylko raz na sekundę, ale potem system NCU powtarza na swoim wyjściu te oryginalne komunikaty L110 i L111 10 razy w odstępach co 100 ms.
Inaczej tworzone są komunikaty L310 (Present Position Latitude) + L340 ((Present Position Fine Latitude) oraz L311 (Present Position Longitude) + L341 (Present Position Fine Longitude). Te pokazują co 100 ms bieżącą pozycję wyliczoną przez FMS i w takiej wersji przysyłane są dalej do TAWS. TAWS otrzymuje zarówno komunikaty L110 i L111, jak i L310 oraz L311. Z raportów UASC wynika, że do oznaczenia pozycji alertów TAWS używane były informacje „Present Position”, czyli z komunikatów L310 i L311. Może to jednak być rezultatem tego, że we wszystkich przypadkach (także dla TAWS#33) TAWS był w „Flight Phase” APPROACH. Nie wiadomo, czy w innych fazach stosowana jest ta sama reguła.
Czas wykonywania funkcji FLTA (poszukiwania miejsca ewentualnej kolizji) w TAWS zmienia się w zależności od tego, jak duży obszar jest do przeszukania i co wynika z kolejnych kroków algorytmu. Jest oczywiste, że raz uruchomiona funkcja nie podejmie nowych działań, dopóki nie zakończy przeszukiwania z poprzednimi argumentami L310 i L311. Ile czasu mija od zakończenia poprzedniego cyklu do podjęcia nowego UASC nie podało, wydaje się jednak, ze wykonywanie tego algorytmu częściej niż raz na sekundę nie ma sensu.
Współpraca systemu FMS i TAWS odbywa się poprzez łącze w standardzie ARINC 429. Okazuje się jednak, że zestaw przekazywanych komunikatów nie jest ściśle dopasowany po obu stronach połączenia, to znaczy: FMS wysyła szerszy zestaw komunikatów niż TAWS analizuje i równocześnie TAWS jest przygotowany na otrzymanie szerszego zestawu komunikatów niż FMS wysyła. To może wynikać z chęci zapewnienia współpracy obu systemów z urządzeniami producentów innych niż tylko UASC.
Na rysunku 2 przedstawiono połączenia między blokami funkcjonalnymi systemów wg dostępnej dotychczas dokumentacji. Paru szczegółów jednak nie można być do końca pewnym. Na rysunku pokazano np. połączenie z TAWS do FMS zakładając, że jedno z łącz ARINC opisywanych w dokumentacji dotyczy właśnie tego, bo łącze nazwano „TAWS Input Bus” i wskazano w nim oprogramowanie FMS w wersji SCN 604/704 lub nowsze. Istnieje jednak możliwość, że ten fragment dokumentacji opisuje łącze z DTU100 do FMS, a nazwa jest tylko pomyłką redakcyjną.
Nie jest dostatecznie jasne, czy moduł ARINC NCU ma zdolność samodzielnego powielania komunikatów otrzymanych na wejściu na swoje wyjście, co mogłoby dotyczyć np. komunikatów L110 i L111 otrzymywanych z GPS. Mogłoby na to wskazywać to, że w wykazie komunikatów przygotowywanych do przesłania z modułu FMS do TAWS nie ma tych komunikatów, a jednak na wyjściu NCU rozpatrywanego jako całość te komunikaty są.
Jak wspomniano wcześniej w końcowej fazie lotu z system TAWS otrzymywał dane o pozycji samolotu z systemu FMS1, a ABSU z systemu FMS2. Ponieważ technicznie istniała możliwość, że zegary systemów FMS1 i FMS2 były tylko w przybliżeniu zsynchronizowane z czasem GPS, mogło to oznaczać, że czasy alertów odnotowanych w systemie TAWS nie są spójne z odliczaniem czasu przez system FMS2. Jest jednak argument wskazujący na to, że czasy FMS1 i FMS2 były jednak jakoś synchronizowane. Argumentem tym jest to, że statusy obu systemów podają w przybliżeniu zgodne wartości pozycji Longitude - czyli że były wyliczone w tym samym czasie.
Analizując raport przedstawiony przez UASC odnośnie FMS można dojść do następujących wniosków:
1) Końcową pozycje samolotu otrzymano z systemów GPS 1,2,3. Potem wartości te zostały przesłane do modułu ARINC, a stamtąd pobrał je procesor modułu FMS i zapisał w podtrzymywanej przez baterię pamięci RAM. Nie ma innej drogi, która pozwalałaby wpisać informację o pozycji samolotu do tej pamięci.
2) Informacja o pozycji zapisana w statusie FMS powstała w poprzednim cyklu obliczeniowym systemu i służy do wypracowania sygnałów wyprowadzanych na jego wyjścia analogowe (i być może cyfrowe).
3) Pozycja wyliczona do przekazania na wyjście systemu FMS2 różni się tylko o 100 ms od pozycji wskazywanej przez systemy GPS. Z tego wynika, że proces obsługujący wyjście zdążył przygotować do wysłania ostatni 10 komunikat w cyklu z pozycją samolotu do TAWS, a proces obsługi wejścia zdołał wprowadzić z ARINC Board otrzymane dane z GPS 1, 2, 3 ale nie zdołał już wyliczyć nowej BCP, wynikającej z tych danych i w takim stanie nastąpiło zamrożenie pamięci FMS.
W celu zapoznania się z udostępnionymi przez Tigera65 fragmentami dokumentacji proszę przeczytać jego komentarze pod notką:
https://www.salon24.pl/u/kameleon/1009035,nie-ma-dochodz-wolniej-cvr-tu154m101






Komentarze
Pokaż komentarze (19)