
Myślałem że ta symulacja da mi wiele odpowiedzi, niestety dane z niej zebrane nic wiele nie wyjaśnia, a dają nowe pytania. Trudno jest oszacować czego się nie wie, mimo że jest to kolejny duży krok do przodu, to niestety mety która miała być tuż za zakrętem nie widać. Meta może być za następnym zakrętem a może być za zakrętami wieloma.
Co pokazała symulacja? Ano to że najprawdopodobniej moje przypuszczenia są błędne, ano to że przypuszczenia tych którzy mi doradzali są błędne, ano to że podręczniki są tu bezużyteczne, czyli znów jestem w ciemnej d*.
Niektórzy powiedzą że przeczę sam sobie ale to nie tak. Moje wywody opieram na wiedzy jaką zdobyłem na ten temat (niektórzy powiedzą że moja wiedza jest mała, ale ja uważam że już teraz wiem sporo więcej od tego co pokazuje współczesna nauka, już teraz znam sporo więcej odpowiedzi niż niejeden specjalista z tej dziedziny). I kiedy poznam nowy szczegół nowy fakt to dopasowuje moje wyobrażenie do nowej wiedzy, a nie próbuje zmienić faktów by potwierdzić moje wyobrażenia. Nie upieram się przy jakimś założeniu które okazało się błędne. Wysuwam mnóstwo tez a następnie je obalam co zbliża mnie do prawdy, gdyż mając dowód negujący masz pewność że dane rozwiązanie jest fałszywe, a prawdziwej tezy obalić się nie da, czyli prędzej czy później ją znajdę.
Po tej symulacji mogę uczciwie powiedzieć że wiem że nic nie wiem, a dla mnie jest to już coś. A Fizycy niech dalej myślą że wiedza wszystko, a tak naprawdę umknęło im sporo.
Umiejąc już symulować obroty bryły sztywnej i bogaty w sporą wiedzę o zależnościach wektorowych, bez większych problemów wyliczyłem wektory prędkości dla punktów.
Z dzieciną łatwością robię coś na co nikt przede mną się nie odważył i nikt tego zrobić nie chciał. Wyznaczam wektor przyspieszeń dla punktów poprzez łatwe równanie a=(v1-v0)/dt. I rozkładam te przyspieszenia na składową liniową wzdłuż wektora prędkości al i poprzez odjęcie tych wektorów uzyskuje składową przyspieszeń prostopadłą do prędkości ad=a-al.
Idzie gładko i jak się bawić to się bawić. Wyznaczam teraz wypadkową siły działające na punkt podczas efektu, prostym wzorem F=am. Rozkładam tą siłę na składową centralną czyli działającą wzdłuż promienia Fc i siłę do niej prostopadłą Fm. Fm rozpatrując BS jest siłą tworzącą moment siły. Amator patrząc na tą symulacje dostanie oczopląsu, ale ktoś kto posiada wiedzę o wektorach bez problemu rozpozna który wektor jest od czego.
Wyjaśniając:
Żółty wychodzący od mas jest wektorem prędkości v
Czerwony jest równoległy do jasnobrązowego i jest to wektor przyspieszenia całkowitego. Jasnobrązowy jest to wektor wypadkowych sił działający na punkt.
Zielony jest to wektor przyspieszenia liniowego hamującego lub przyspieszającego punkty.
Jasnoniebieski jest przyspieszeniem dośrodkowym zmieniający kierunek prędkości.
Różowy jest siłą centralną i wektory te się zerują
Pomarańczowy jest wektorem siły dającej Moment siły.
Skoro to takie proste to czemu to nikt wcześniej tego nie pokazał? Bo żeby się bawić to trzeba mieć fantazje a ludzie którzy się tym zajmują najwyraźniej fantazji nie mają:)
Co wiem po tej symulacji?:
Momenty sił wewnętrznych istnieją ale najprawdopodobniej się zerują (o tym za chwilę). Wielu moich rozmówców temu przeczyło i twierdziło że jest to wbrew obecnej wiedzy. Nic bardziej mylnego, momenty sił istnieją i w dodatku wielokrotnie spotkałem się z takim stwierdzeniem w różnych źródłach, ale nie dotarłem jeszcze do wyjaśnienia czemu tak twierdzą i nikt jak do tej pory mi tego nie pokazał. Jednak ci którzy tak twierdzili przeczyli faktom i przeczyli obecnej wiedzy, no cóż bywa.
Wypadkowa sił działających na punkt nie jest siłą centralną, nie jest też siłą do osiową, czyli wiele założeń szlak trafił, bywa.
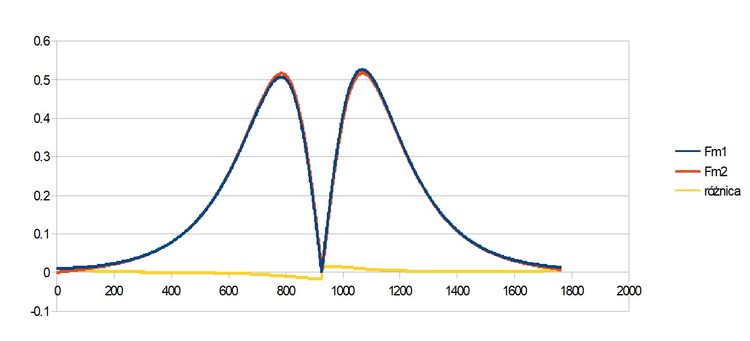
Wykres momentów sił obydwu osi prawie się pokrywa. Czemu prawie? Moja symulacja jest daleka od ideału. Wyliczam pozycje omegi w nieinercjalnym układzie BS, a następnie ten układ obracam do układu inercjalnego i ustalam w nim pozycje omegi. Każdy obrót obarczony jest pewnym niewielkim błędem, problem polega na tym że tych obrotów na jedną symulacje jest parę tysięcy. Po za tym dobrze by było usztywnić układ odniesienia przy obrocie, niestety łącząc osie w ramkę tracę możliwość działania na pojedynczym elemencie ramki, zmusiło mnie to do obracaniu każdej osi osobno, co powoduje że osie się rozjeżdżają. Jakie to są błędy? Razem rzędu kręt porusza się o 0,0001. Moja symulacja pokazała sumę momenty sił rzędu 0,005 przy masach x=1, y=2 i rzędu 0,01 przy masach x=1, y=4. Muszę to jeszcze sprawdzić ale wysoce prawdopodobne że niezerowa suma momentów sił jest wynikiem błędów zastosowanej metody.
Wykres pokazuje wartości sił które znajdują się na równych ramionach.
Mamy tez pewne cuda. Jest przyspieszenie kątowe a najprawdopodobniej nie ma klasycznego momentu sił. Jednak coś co powoduje przyspieszenia kątowe do momentu sił jest podobne, jeden z czytelników nazwał to pseudo-wektorem pseudo momentów sił. Dla mnie brzmi dziwnie i może nazwać to momentem kręcącym? Zobaczymy jak to znajdziemy.
Mamy ewidentne przyspieszenia punktów chociaż układ jest odizolowany.
Punkty rozpędzają się do pewnego środka równowagi a następnie hamują, coś jak oscylacja ale nie ma tu przejścia energii potencjalnej w kinetyczną i na odwrót, czyli mamy oscylacje która oscylacją nie jest.
Ci którzy twierdzą że wszystko wiadomo proszeni są o wyjaśnienie tych paradoksów, bo ja po tej symulacji jestem dużo bardziej głupszy niż byłem przed nią. A już myślałem że coś rozumiem:)





Komentarze
Pokaż komentarze