
Można rozważać następujące typy sztucznych horyzontów instalowanych w samolotach (Tu154M):
- autonomiczny AGR-72A
- zdalny PKP-1 (ПКП-1, дистанционный).
Wskaźnik sztucznego horyzontu AGR-72A ma własny żyroskop i działa w trybie rezerwowym. Nie będziemy się nim tutaj zajmować, gdyż w samolocie TU-154M nie ma on sprzężenia z system rejestracji parametrów lotu MSRP-64. Istotną rolę w rejestracji przechylenia odgrywa sztuczny horyzont PKP-1, który otrzymuje informację o przechyleniu samolotu z bloku żyroskopów MGW-1SK, tak jak to przedstawiono na rysunku 1. Żyroskopy MGW-1SK umieszczone w pewnej odległości od przyrządu PKP-1, w pobliżu środka ciężkości samolotu.

Rys. 1. Ciąg urządzeń zaangażowanych do rejestracji przechylenia samolotu
W raportach MAK i KBWLLP, dotyczących katastrofy w Smoleńsku zamieszczane są wykresy przechylenia samolotu, które pokazują, że maksymalna zmierzona wartość tego przechylenia wynosiła około 66 stopni. Na rysunku 1 przedstawiono ciąg urządzeń, które brały w pomiarach. Wg dostępnych dokumentacji żyroskop MGW-1SK (МГВ-1СК) posiada zdolność wykonywania pomiarów przechylenia wokół osi X w zakresie -+180 stopni, przetwornik BSU-1 (БСУ-1) wprowadza ograniczenie do około 83 stopni, przyrząd PKP-1 (ПКП-1) zaczyna zawodzić dopiero przy wartości ponad 90 stopni. Powstaje zatem pytanie, gdzie tak naprawdę zadziałał mechanizm, który spowodował ograniczenie pomiaru do wartości około 66 stopni?
Niestety nie da się w pełni przeanalizować pracy całości opisywanego tu podsystemu, gdyż jest on elementem systemu STU-154, którego schematy są niedostępne. W Internecie można znaleźć tylko fragmentaryczne opisy niektórych bloków. Na tej podstawie poniżej przedstawiono najbardziej prawdopodobne wytłumaczenie zasady przekazywania przechylenia samolotu do przyrządu PKP-1.
Dostępne informacje o funkcjonalności wewnętrznej PKP-1, dotyczące pokazywania kąta przechylenia samolotu pokazano na rysunku 2. Są tam widoczne dwa urządzenia:
- resolwer M2, typu SKT-232, oraz
- silnik M1, typu DG-0.5TW.
Istotną rolę w sterowaniu wskaźnika kąta przechylenia odgrywa też wzmacniacz sygnału różnicowego U-87, którego schemat niestety jest niedostępny.
Silnik M1 jest widoczny na schemacie kinematyki PKP-1, jak na rysunku 6 w dokumencie [1]. Jak widać wpływa on na ustawienie czaszy poprzez kilkustopniową przekładnię.
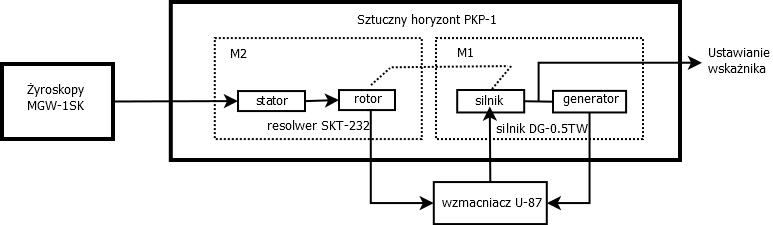
Rys. 2 Wybrane elementy składowe przyrządu PKP-1
Działanie całości systemu wg dostępnych opisów jest następujące: z żyroskopów doprowadzone są sygnały pokazujące bieżące przechylenie do statora resolwera (transfomatora sinus/cosinus) sprzężnego ze sztucznym horyzontem PKP-1. Z rotora tego resolwera zdejmowany jest sygnał, pokazujący różnicę między przechyleniem, zmierzonym przez żyroskopy, a przechyleniem pokazywanym przez PKP-1. Różnicę tę odbiera wzmacniacz U-87 i na tej postawie podaje zasilanie do silnika obracającego poprzez przekładnię zębatą wskaźnik przechylenia. Dzieje się tak, aż sygnał wejściowy zejdzie do wartości zerowej. System MSRP-64 otrzymuje do rejestracji sygnał wynikający z bieżącego ustawienia wskazania przechylenia przez PKP-1 z resolwera M7.
Silnik M1 typu DG-0.5TW, kontrolujący położenie czaszy pokazującej przechylenie samolotu w PKP- 1 jest asynchronicznym dwufazowym silnikiem z wbudowanym tachogeratorem.
Wzmacniacz U-87 może wpływać na obroty silnika zamieniając trzy parametry zasilania:
- napięcie, nominalnie 30 do 36 V;
- częstotliwość, nominalnie 400 Hz (dopuszczalne 10 do 1000Hz);
- przesunięcie fazowe prądu podawanego na oba uzwojenia stojana, standardowo powinno to być 90 stopni.
Wartość napięcia zasilania nie wpływa w istotny sposób na prędkość obrotów silnika asynchronicznego – istotny wpływ ma częstotliwość napięć zasilających. Napięcie zasilające powinno być bliskie wartości nominalnej lub równe 0, wtedy silnik się zatrzyma. Zatrzymanie silnika jest konieczne, gdy samolot przez chwilę leci ze stałym kątem przechylenia. Kinematyka PKP-1 musi być skonstruowana w ten sposób, by przy braku zasilania podawanego do silnika, opór mechanizmów wystarczał do utrzymania czaszy wskaźnika w stabilnej pozycji.
Kierunek obrotu silnika zależy od znaku przesunięcia fazowego napięć podawanych na oba uzwojenia silnika. W jednym przesunięciu np. +90 stopni silnik będzie się obracał zgodnie ze wskazówkami zegara, przy -90 stopni w kierunku przeciwnym. Nie rozważa się innych wartości przesunięcia fazowego.
Silnik DG-0.5TW do uruchomienia wymaga większego prądu (około 185 mA), niż później do stabilnej pracy (około 130 mA). W związku z tym układ U-87 musi na początku podać większe napięcie zasilające i poprzez sygnał z tachogeneratora, znajdującego się w silniku, obserwować jego prędkość obrotową. Gdy z wartości obserwowanego sygnału wynika, że osiągnięto już nominalną prędkość, napięcie zasilające może zostać zredukowane, tak by prąd zszedł do wartości 130mA.
Teoretyczne można rozważać regulację prędkości obrotowej silnika poprzez wpływanie na częstotliwość napięć zasilających uzwojenia. Ponieważ wirnik silnika porusza się „w poślizgu” w stosunku do wirującego pola elektromagnetycznego, prędkość obrotów nie wynika wprost z częstotliwości z prądu zasilającego i dlatego można by rozważać dodatkową kontrolę tej prędkości poprzez wartość sygnału z tachogeretatora. Jest jednak bardzo wątpliwe, by zdecydowano się na tak skomplikowane rozwiązanie, bez którego można się całkowicie obyć.
Nie da się jednoznacznie powiedzieć, czy U-87 ma jakieś mechanizmy wyłączające silnik, jeśli sygnał z rotora ma zbyt dużą wartość lub silnik wszedł w zbyt duże obroty. Każdy z tych stanów mógłby się pojawić, gdy samolot zaczął się przechylać ze zbyt dużą prędkością, której konstruktorzy nie przewidzieli, jako dopuszczalnej wartości pojawiającej się w czasie eksploatacji samolotu.
Nie ma jednej prostej odpowiedzi na pytanie, jak zachowa się wskaźnik po zaniku zasilania – wszystko zależy od tego, zasilanie którego z urządzeń zacznie zanikać najpierw:
- żyroskopów MGW-1SK, czy
- układu wzmacniacza U-87.
Film https://www.youtube.com/watch?v=BBRucGKyPao pokazuje jak zachowa się PKP-1 po całkowitym odłączeniu go od zasilania i kontaktu z żyroskopami. Jak widać czasza wskaźnika przechylenia pozostaje w stałej pozycji względem obudowy przyrządu.
W dokumentacjach poszczególnych urządzeń nie widać mechanizmu, który mógłby zaaretować położenie wskaźnika przechylenia w stałym położeniu. Co najwyżej można się spodziewać zahamowania jego ruchu przez opory mechaniczne, tak samo jak przy wyłączeniu napięcia zasilającego przez U-87 po uzyskaniu zgodności przechylenia podawanego przez żyroskopy i pokazywanego przez PKP-1. Jeśli czasza wskaźnika jest dobrze wyważona, to opory te mogą wystarczyć do utrzymania dotychczasowego położenie względem obudowy. Przy działaniu dużych sił zewnętrznych czasza może się jednak poruszyć względem obudowy.
Na schemacie elektrycznym PKP-1, przedstawionym na rysunku 5 w dokumencie [1] , zwraca uwagę wyłącznik W1, którego zwarcie powoduje podanie sygnału z uzwojenia wzbudzającego silnika M1 do uzwojeń rotora resolwera M2. Takie zwarcie prawdopodobnie służy do zakłócenia pracy resolwera, tak by zaczął podawać do układu U-87 sygnał wymuszający przestawienie położenia wskaźnika przechylenia PKP-1 do pozycji testowej (wg opisu 15 stopni). Aby jednak takie wymuszenie było możliwe, oba uzwojenia rotora resolwera muszą być połączone, gdyż inaczej nie dałoby się skutecznie doprowadzić napięcia wymuszającego do uzwojeń. To prawdopodobnie oznacza, że oba uzwojenia rotora połączono ze sobą, uzyskując liniowy tryb pracy, dla którego istnieje ograniczenie skutecznego przekazywania kąta wychylenia -+60 stopni.
W oryginale dokumentacja resolwerów z tej rodziny stanowi:
„В зависимости от схемы включения и режима работы (выполняемых функций) приборы трансформатор вращающийся бескорпусной двухполюсный СКТ-232Б подразделяются на синусно-косинусные (СКВТ), выходное напряжение которых изменяется пропорционально синусу (косинусу) угла поворота ротора, и линейные (ЛВТ), выходное напряжение которых изменяется по линейному закону пропорционально углу в пределах ±60°.”
W dokumentacji PKP-1 jest mowa o nieco innym typie resolwera (SKT-232B), ale podobne stwierdzenia można znaleźć przy wielu innych typach z tej samej rodziny. Nie znalazłem osobnej dokumentacji typu SKT-232 i dlatego nie mogę się powołać na ten typ wprost.
W czasie katastrofy w Smoleńsku odnotowano zatrzymanie się zapisu kąta przechylenia na wartości około 65 stopni. Zatrzymanie się wskazania PKP-1 na wartości około 66 stopni mogło wynikać z zaniku zasilania, ale według mnie jest to rezultat zadziałania ograniczenia przekazywania kąta przechylenia przez resolwer SKT-232 z bloku żyroskopów do wskaźnika PKP-1. Ograniczenie to wynikło z przyjętego w konstrukcji PKP-1 trybu linowej pracy resolwera SKT-232, dla którego istnieje ograniczenie zakresu pracy do około +-60 stopni.
Po sprawdzeniu dodatkowych dokumentów skreśliłem przedstawioną wyżej hipotezę o ograniczeniu z powodu zastosowania trybu pracy linowej (ЛВТ). Wymaga on jednak innej konfiguracji połączeń uzwojeń, niż to wynika z rysunku w podręczniku Kuzniecowa [1]. Pozostaje zatem tylko zanik zasilania lub wyłączenie silnika M1 przez U-87 z powodu zbyt dużego przechylenia samolotu.
Bibliografia
1. С.В.Кузнецов, Пособие по подготовке к лабораторной работе по дисциплине "ПИЛОТАЖНО-НАВИГАЦИОННЫЕ КОМПЛЕКСЫ" «Изучение и исследование системы траекторного управления СТУ-154-2»






Komentarze
Pokaż komentarze (45)