
Tekst zmieniono 5.03.2019
Jak wiadomo, przy braku systemu precyzyjnego naprowadzania typu ILS lub RSBN/PRMG, pilot TU154M nie dysponuje żadnym prostym mechanizmem służącym do utrzymania samolotu na ścieżce schodzenia. Może tylko odczytywać wysokość ciśnieniową oraz odległość do progu i na tej podstawie manewrować kątem pochylenia samolotu oraz prędkością IAS. Nie ma przy tym jednak żadnego prostego sposobu przeliczenia odczytanych danych na stosowne ustawienia pokręteł na pulpitach zadających kąt pochylenia i IAS – wszystko odbywa się metodą „prób i błędów”.
Z kolei ABSU, które otrzymuje nastawy kąta pochylenia i zadanej IAS musi to przełożyć na ruchy sterów wysokości i innych lotek oraz (jeśli włączony jest automat ciągu) na ustawienie siły ciągu silników. Również ABSU nie ma jednoznacznego przelicznika, określającego jak ustawić serwomechanizmy wykonawcze dla sterów i silników, skoro pilot zadał kąt pochylenia i prędkość IAS – najpierw wykonywane jest ustawienie przybliżone, a potem wykonywane są impulsowe korekty.
Analogicznie wygląda to wtedy, gdy w kanale podłużnym ABSU ustawiono nie tryb stabilizacji kąta pochylenia, ale tryb stabilizacji wysokości mierzonej barometrycznie. Jak w obu trybach wyglądało to podczas podejścia do lotniska w Smoleńsku można zobaczyć na wykresie 1.
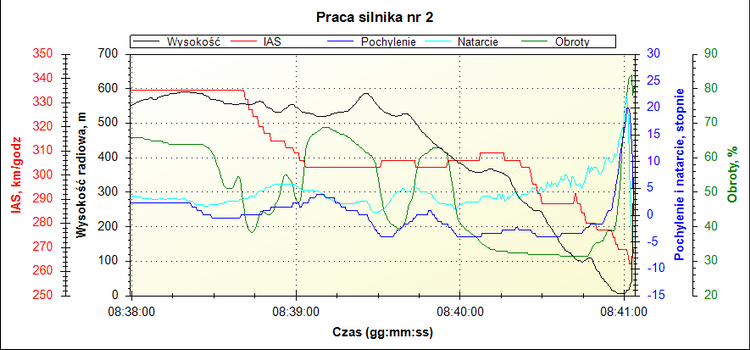
Wykres 1. Dynamika lotu samolotu na podejściu do lotniska
Jak widać, około 8:38:25 zaczyna się spadek obrotów sprężarki niskiego ciśnienia w silniku jako skutek zmiany pochylenia samolotu - ten spadek obrotów nie zmienia jeszcze prędkości zmierzonej. Automat ciągu nie poprzestaje jednak na ustawieniu jednej stałej wartości siły ciągu, ale mając pomiary: IAS, przyspieszenia wzdłużnego i kąta pochylenia samolotu wykonuje działanie korekcyjne, lekko podnosząc obroty o 8:38:39.
O 8:38:40 następuje przestawienie prędkości zadanej, na co AT reaguje kolejną redukcją obrotów. W rezultacie zamierzona prędkość IAS o 8:38:41 zaczyna spadać. O 8:38:45 redukcja obrotów zostaje zatrzymana, czym AT najpierw przeciwstawia się dalszemu spadkowi IAS, a potem o 8:38:56 wprowadza kolejną korektę w dół.
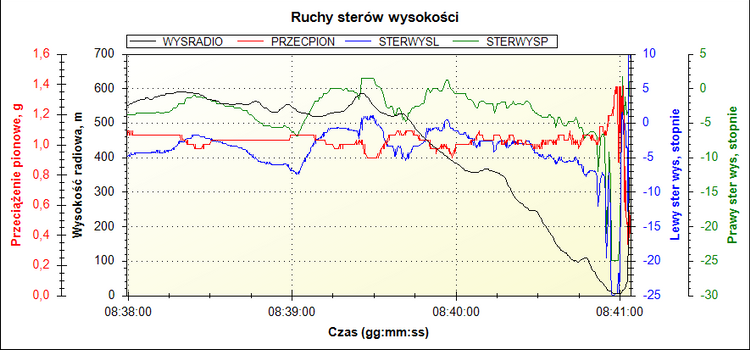
Wykres 2. Ustawienia sterów wysokości
Na wykresie widać także zmiany wysokości mierzonej radiowysokościomierzem, ale jak to pokazano na wykresie 2 brak jest zmian przeciążenia pionowego. To oznacza, że nie zmienia się wysokość lotu mierzona ciśnieniowo. Analiza przeciążenia pionowego w pokazywanym tu przedziale czasowym oraz w okresie poprzedzającym pokazuje, że parametr ten zmieniał się w niewielkim zakresie. To może oznaczać, że kanał sterowania podłużnego ABSU pracował wtedy w trybie stabilizacji wysokości barometrycznej H. Praca w takim trybie tłumaczyłaby stosunkowo małe skoki przeciążenia mimo zachodzących zmian ustawienia sterów wysokości i co za tym idzie pochylenia samolotu.
Jaka można zobaczyć na wykresie 3, o 8:39:00 nastąpiło przestawienie kąta klap z 30 na 36 stopni i stabilizatorów z -1.6 na -3.1 stopnia. To musiało spowodować zmiany obserwowanych przez AT parametrów i stosowną reakcję w postaci impulsowego dodania gazu między godziną 8:39:00 a 8:39:30, tak by zahamować spadek prędkości IAS poniżej zadanej wartości. Niezależnie od tego, sterowanie w kanale podłużnym ABSU zaczęło manewrować sterami wysokości, czego rezultatem była dalsza zmiana orientacji samolotu w kierunku "dziobem do góry". Działanie kanału sterowania podłużnego ABSU w tym czasie opisano w dokumentacji ABSU tom II strona 73/434 w rozdziale dotyczącym stabilizacji wysokości H:
Для устранения изменения высоты полета самолета при выпуске механизации вводится программный сигнал ϑоп который включается через 4 с после начала выпуска закрылков, а через 20 с плавно уменьшается.
Czyli:
W celu ochrony przed zmianą wysokości lotu samolotu przy uruchomieniu mechanizacji (skrzydeł) wprowadza się programowy sygnał ϑоп, który włącza się na 4 sek po wypuszczeniu klap, a potem przez 20 sek płynnie się zmniejsza.
Wzrost siły nośnej skrzydeł po ustawieniu klap mimo tego mechanizmu jednak spowodował ruch samolotu do góry, ale ABSU kompensowało to zmieniając ustawienie sterów i co za tym idzie pochylenie samolotu. Analiza przeciążeń na dłuższym odcinku pokazuje, że akcelerometr rejestrujący przeciążenia pionowe reaguje nie tylko na zmiany prędkości pionowej, ale także na zmiany pochylenia samolotu. Sumaryczny efekt był taki, że akcelerometr dał się oszukać i nie tylko nie pokazał wzrostu przeciążenia, ale nawet jego niewielki spadek poniżej 1 g.
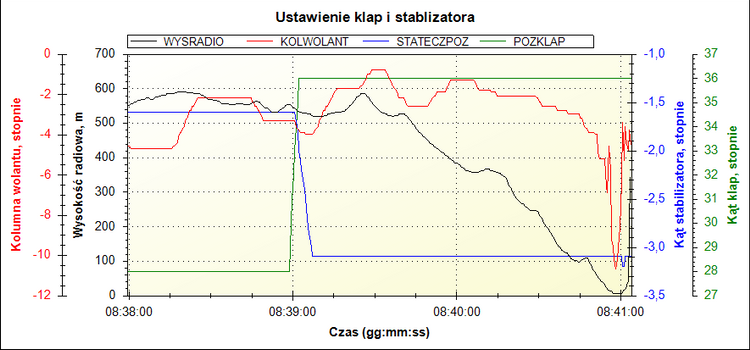
Wykres 3. Moment przestawienia klap
Kolejna zmiana pochylenia w dół pojawia się wtedy, gdy ten sztucznie wymuszony sygnał ϑоп znika. ABSU powraca wtedy do normalnego algorytmu stabilizacji H i zauważa, że samolot jednak leci zbyt wysoko i dlatego skokowo przestawia stery wysokości. Samolot zaczyna opadać, co widać na wykresie przeciążenia pionowego.
Kiedy na skutek spadku siły ciągu silników prędkość IAS zaczyna spadać, automat ciągu znowu dodaje gazu. Równocześnie zaczyna wzrastać kąt pochylenia samolotu jako skutek ustawienia sterów wysokości około 8:39:35. Prędkość IAS stabilizuje się około 8:39:45, jednak pochylenie jest za duże w stosunku do wartości odpowiedniej do utrzymania wysokości H, na co ABSU reaguje zwiększając kąt ustawienia sterów wysokości. Pochylenie samolotu zaczyna się zmniejszać. Automat ciągu widząc zmiany pochylenia i wzrost IAS zmniejsza obroty silników najpierw do poprzedniej stabilnej wartości, którą osiąga około 8:40:00, a potem do minimalnej dopuszczalnej wartości, ale prędkość IAS nadal rośnie. Decyduje o tym wzrastający udział rzutu siły ciążenia na kierunek ruchu samolotu.
Sądząc ze zmian kąta pochylenia samolotu, około godziny 8:40:00 nastąpiła zmiana w sterowaniu przez ABSU w kanale podłużnym, tj. przestawienie z trybu stabilizacji wysokości barometrycznej H do stabilizacji kąta pochylenia ϑ.
W wyniku istniejących oporów aerodynamicznych około godziny 8:40:22 zaczął się spadek prędkości, jednak tym razem AT nie zareagował na to impulsem korekcyjnym. Najwyraźniej pilot zmniejszył zadaną wartość IAS, tak by się zapewnić bezpieczne zniżanie samolotu. To zmniejszenie zadanej prędkości to jedyny manewr, którym mógł to utrzymanie zniżania zapewnić w sposób bezpieczny. Nie wydaje się, aby bezpieczny był inny dostępny manewr, to jest dalsze zmniejszanie kąta pochylenia z zachowaniem dużej prędkości IAS.
Jak widać na wykresie 1, obroty silników w trakcie korekcyjnych wzrostów osiągnęły wartość, jak przed spadkiem IAS o 8:38:25, jednak prędkość nie wróciła do tamtej stabilnej wartości - wzrosły opory aerodynamiczne z powodu zmiany kąta ustawianie klap i dodatkowo impulsowe zwiększenia ciągu trwały zbyt krótko.
Pełną analizę rozkładu sił decydujących o ruchu postępowym samolotu można znaleźć w notce you-know-who:
https://www.salon24.pl/u/fizyka-smolenska/938891,58-nie-ma-niezgodnosci-danych-o-ostatnim-znizaniu-tupolewa-pod-smolenskiem
Impulsowe manewrowanie siłą ciągu przez pilota i AT w samolocie TU154M można odsłuchać sięgając do filmu pokazującego, jak to było 7.04.2010 r.
https://www.youtube.com/watch?v=IgGkqzCDNy8
Dzięki „Nudna Teoria” za wskazanie tego linku. Dzięki także za wskazanie błędów nomenklaturowych, które starałem się usunąć w kolejnych wersjach notki.
Pierwszy wniosek z zamieszczonych tu wykresów jest taki, że w pełni potwierdza się to, co napisałem na początku notki: ustawienia mechanizmów wykonawczych przez ABSU odbywa się metodą adaptacyjną – najpierw ustawienie przybliżone, potem kolejne korekty, co powoduje wahania nastaw i trajektorii samolotu wokół wartości pożądanej.
Wniosek z analizy jaką przeprowadził you-know-who jest taki, że nieprawdą jest to, że wtedy gdy obroty silników spadają, to IAS też musi spadać. O kierunku zmian IAS decyduje bowiem bilans sił. Dopóki siła ciągu silników i rzutu siły grawitacyjnej na kierunek ruchu jest większa niż opory aerodynamiczne samolotu, prędkość IAS może rosnąć mimo tego, że obroty silników maleją.
Kolejny wniosek dotyczy możliwości sfałszowania zapisów rejestratorów. W notce pominięto wykresy pokazujące pracę serwomechanizmów i inne parametry lotu, są one jednak związane z tym, co widać na pokazanych wykresach – związki wynikają z aerodynamiki samolotu. Wyprodukowanie pełnego zbioru tak skoordynowanych wartości parametrów, dodatkowo zgodnych profilem terenu i śladami kolizji z drzewami oraz z danymi z systemów FMS i TAWS jest niezwykle trudne i nie jest to zajęcie możliwe do wykonania w ciągu kilku dni.






Komentarze
Pokaż komentarze (114)