
Chwile mnie nie było ale adaptacja w nowym miejscu pracy chwilę zajęła. Niestety nie robię dokładnie tego co zwykle co wymaga ode mnie większego zaangażowania a to skutkuje brakiem czasu na moje poszukiwania rozwiązań. Ale cóż poradzisz, życie to nie bajka. Powoli wracam i przez ostatnie dwa tygodnie pracowałem z powodzeniem nad symulacją efektu w układzie inercjalnym.
Ponieważ była dłuższa przerwa przygotowałem nowe podsumowanie by nowi czytelnicy mogli się zapoznać z tematem a być może ci którzy z tematem są zapoznani będą chcieli sobie też sobie przypomnieć o co mi chodzi. Podsumowanie po filmiku. Na końcu umieszczam kod do animacji.
Jak działa program? Wzory Eulera pracują w układzie bryły, przy czym w jednym kroku najpierw obracam układ odniesienia BS w przestrzeni a następnie w tym układzie wyznaczam nową pozycje omegi. Z dokładnością jest trochę słabo wyliczany wektor krętu przemieszcza się o 0,001 ale na tym etapie jest to do zaakceptowania. Musze pomyśleć jak uzyskać większą dokładność, jeżeli ktoś ma jakieś pomysły jak to zrobić to proszę pisać.
Ta symulacja sporo mnie nauczyła na temat tensora momentu bezwładności i teraz postaram się na nim skupić by go w pełni zrozumieć, by rozszyfrować w pełni znaczenie jego parametrów. Zakupiłem też w końcu trzy podręczniki do mechaniki, niestety tylko w jednym interesujący mnie temat był opisany nieco lepiej, jest to „Mechanika” Wacław Tybor, Krzysztof Kowalski. Jest tam bardzo ciekawe stwierdzenie:
„Niediagonalne elementy tensora bezwładności nazywają się czasem momentami dewiacyjnymi, ponieważ związane są z momentami sił dążącymi do zmiany kierunku osi obrotu”.
Czyli świat Fizyki wie o istnieniu momentów sił tylko nie jest jeszcze tego świadomy co to oznacza. Oczywiście przy obecnej interpretacji gdzie najpierw wylicza się główne momenty bezwładności a potem na ich podstawie wylicza się tensor bezwładności to momenty dewiacyjne się zerują, pytanie jest czy taki sposób modelowania odpowiada rzeczywistości. Zrozumienie w pełni tensora powinno w końcu dać mi wszystkie odpowiedzi których szukam.
Zrozumieć mechanikę bryły sztywnej. Nowe możliwości.
Jestem człowiekiem ciekawym życia nieustanie szukającym odpowiedzi na temat sekretów otaczającej nas rzeczywistości. Kilka lat temu zainteresowałem się amatorsko Fizyką i nie umiem się z tego wyplątać. Mnóstwo pytań, mnóstwo tajemnic na które chciałbym znaleźć odpowiedzi. Jakiś już taki jestem że zawsze nasuwają mi się pewne pomysły jak niektóre zagadnienia można by nico inaczej rozumieć. Nie boję się odważnie myśleć i nie boję się popełniać błędów no i często też błędy popełniam, jednak ucząc się na błędach dopracowuje moje pomysły by lepiej mogły odzwierciedlać rzeczywistość.
Niestety w dzisiejszym świecie gdzie każdy ma swoją prawdę, bardzo trudno jest przedyskutować nowe rozwiązania bez zbędnych emocji, w sposób obiektywny i poddać nowe rozwiązania rzetelnej weryfikacji. Niestety ponieważ moje pomysły często są odważne od razu są wrzucane do szufladki nauki alternatywnej, czyli nieprawdziwej. Nie uznaje takiego terminu jak Fizyka alternatywna bo Fizyka jest jedna, ja jedynie na to samo staram się popatrzeć z innej perspektywy i zapisać to samo w inny sposób. Niestety dzisiejszym świecie „inne” od razu znaczy „błędne” a dla mnie te dwa wyrażenia nie są tożsame. Często słyszę że moje rozwiązania nie są zgodne z szeroko uznanymi rozwiązaniami przyjętymi przez świat nauki ale dla mnie nie jest to żaden dowód na błędność moich pomysłów. Błędność lub poprawność danej tezy można jedynie stwierdzić na podstawie dowodu i dlatego wszelkiego rodzaju opinie (chociaż często cenne) są dla mnie jedynie opiniami i dlatego nie uznaje ich jako kryterium poprawność moich tez.
Pomysły te były już dyskutowane na innych forach i starałem się też nimi bezskutecznie zainteresować uczelnie techniczne. Piszę tutaj w nadziei że znajdą się to ludzie którzy zechcą ze mną podjąć tą podróż i znaleźć rozwiązania poruszanych problemów. Ja nie twierdzę że moje rozwiązania są poprawne bo dowodu na to nie mam, dlatego też jestem otwarty na wasze propozycje rozwiązań.
Już ponad rok temu profesor Arkadiusz Jadczyk na swoim blogu (podaje linka do jednego z jego notek)
https://arkadiusz-jadczyk.salon24.pl/731259,euler-rozszyfrowany
starał się lepiej zrozumieć efekt Dżanibekowa i jakoś mnie tym zaraził.
Swobodny ruch obrotowy bryły sztywnej opisują równania Eulera. Bardzo fajną prezentacje na ten temat można znaleźć tutaj
http://readgur.com/doc/245457/mechanika-bry%C5%82y-sztywnej-cz%C4%99%C5%9B%C4%87-ii-mechanika-bry%C5%82y-sztywne...
Dokonałem bardzo prostych przekształceń tych wzorów których nie wiadomo czemu Fizycy uznać nie chcą
Wiedząc że
M=Iɛ=Iω^2 (1)
można teraz przekształcić te wzory w następujący sposób
Ixɛx = Iyωyωz – Izωzωy + Mxz = Mx (2a)
Iyɛy = Izωzωx – Ixωxωz + Myz = My
Izɛz = Ixωxωy – Iyωyωx + Mzz = Mz
Mxz ; Myz ; Mzz -Momenty sił zewnętrznych w naszym przypadku równe są zero. Mamy więc
Ixɛx = Iyωyωz – Izωzωy = Mx (2b)
Iyɛy = Izωzωx – Ixωxωz = My
Izɛz = Ixωxωy – Iyωyωx = Mz
Czym są człony Iyωyωz ? Przypuszczam że są to momenty sił wewnętrznych a głównym podejrzanym o jego przyczyny są siły więzów. W dalszej części tekstu będę przedstawiał kolejne argumenty za właśnie takim rozwiązaniem.
Oczywiście wzory te są dla układu nieinercjalnego bryły sztywnej gdzie główne momenty bezwładności bryły pokrywają się z osiami głównymi. Bardzo łatwo jest je za symulować i zrobiłem to bez większych problemów.
Wektory przyspieszenia kątowego i prędkości
Moment siły
Udało mi się też rozłożyć składowe ɛ na tą powodowaną zmianą momentu bezwładności i działaniem momentu siły.
I już na starcie nikt nie chce uznać tak prostych przekształceń za prawdziwe. Nikt nie podaje dowodu błędności ale ciągle słyszę że w tym przypadku dω/dt to nie ɛ, ewentualnie że ɛI to nie moment siły bo żadnych przyspieszeń kątowych lub momentów sił tam nie ma. Matematyka jest bezlitosna i jeżeli stwierdzenie M=Iɛ=I(dω/dt) jest prawdziwe to moje przekształcenia też są prawdziwe, niestety wszyscy z którymi do tej pory rozmawiałem ignorują ten fakt i twierdzą że to nie to samo. Przyznam że zderzając się z takim murem ignorancji, gdzie to intuicyjne wnioski są kryterium prawdziwości a nie matematyczne równania, bardzo trudno jest posunąć się o krok do przodu w próbie lepszego zrozumienia tematu. Trudno o jakąś merytoryczną dyskusje.
Czasami są podawane argumenty że:
-momenty siły wynikają z nieinercjalnego układu odniesienia ale ignorowany jest fakt że w inercjalnym układzie równania Eulera nie są zerowe (stały moment bezwładności należy zastąpić tensorem momentu bezwładności) i również występują przyspieszenia kątowe (wektor ω nie jest stały w czasie więc mamy do czynienia z dω/dt) a skoro mamy do czynienia z przyspieszeniem kątowym to jest on efektem działania momentu siły. Tu też prośba do czytelników bo nie umiem zaprogramować tensora momentu bezwładności w praktyce, jeżeli ktoś by mi pokazał jak to zrobić będę bardzo wdzięczny.
-bryła nie może mieć wewnętrznych momentów sił gdyż jest to niezgodne z mechanikom klasyczną. Kolejna intuicyjna ocena nie poparta faktami. Występowanie momentu sił nie musi skutkować zmianom momentu pędu L ale jest to kolejny ignorowany fakt. dL/dt = r x F czyli istnienie sił równoległych do r nie powodują zmiany momentu pędu. Istnienie momentów sił wewnętrznych nie musi skutkować dL/dt. Przypuszczam że właśnie z taką sytuacją mamy tu do czynienia, nie mam jeszcze dowodu ale pierwsze próby wyliczenia wypadkowych sił moją metodom wypadły pomyślnie. A więc postulat istnienia momentów sił wewnętrznych nie musi być sprzeczny z obecnymi prawami Fizyki, to dopiero trzeba udowodnić. Podobny przypadek mamy przy sile dośrodkowej, jej działanie powoduje dv/dt przy czym jej działanie nie skutkuje wykonywaniem pracy czyli zmianom energii.
Mój tok myślowy jest prosty mamy do czynienia z dω/dt więc musi istnieć wektor ɛ. Jeżeli istniej ɛ to jest on śladem po działaniu siły, jednak co to może być za siła? Głównym i jedynym podejrzanym w tym przypadku jest siła więzów, więc trzeba się jej lepiej przyjrzeć. Ruch obrotowy bryły sztywnej BS jest to ruch złożony punktów materialnych połączonymi ze sobą siłami więzów. Siła więzów jest siłą centralną i przy swobodnym obrocie zawsze skierowaną do środka ciężkości. Niektórzy to negują ale z takim stwierdzeniem spotkałem się już w kilku źródłach i uważam je za prawdziwe. Uznając powyższe hipotezy za prawdziwe możliwe powinno być ustalenie mechaniki obrotu punktu w BS z ustalonymi wektorami v, a, F gdzie obrót BS będzie sumą tych punktów.
Znalazłem opis fizyczny wahadła stożkowego który według mnie po usunięciu siły ciążenia można powiązać z mechaniką punktu BS.
https://pl.wikipedia.org/wiki/Wahad%C5%82o_sto%C5%BCkowe
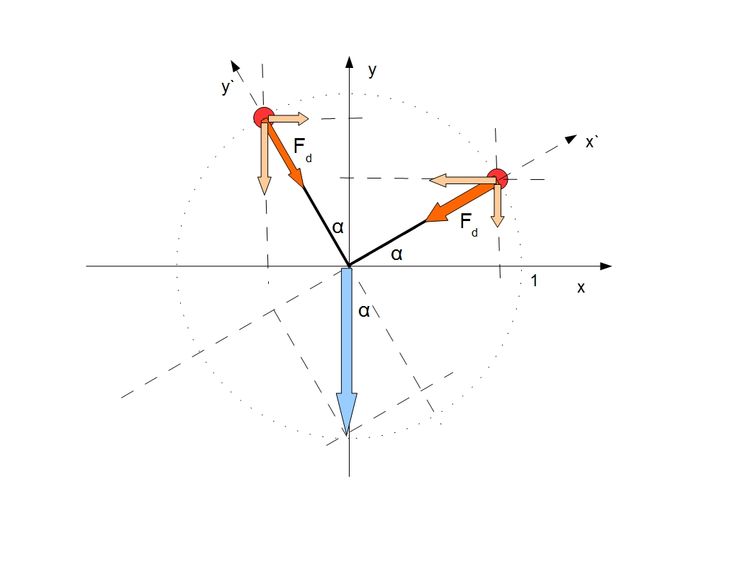
Długo się przyglądałem wahadle stożkowemu i doszedłem do następującego schematu
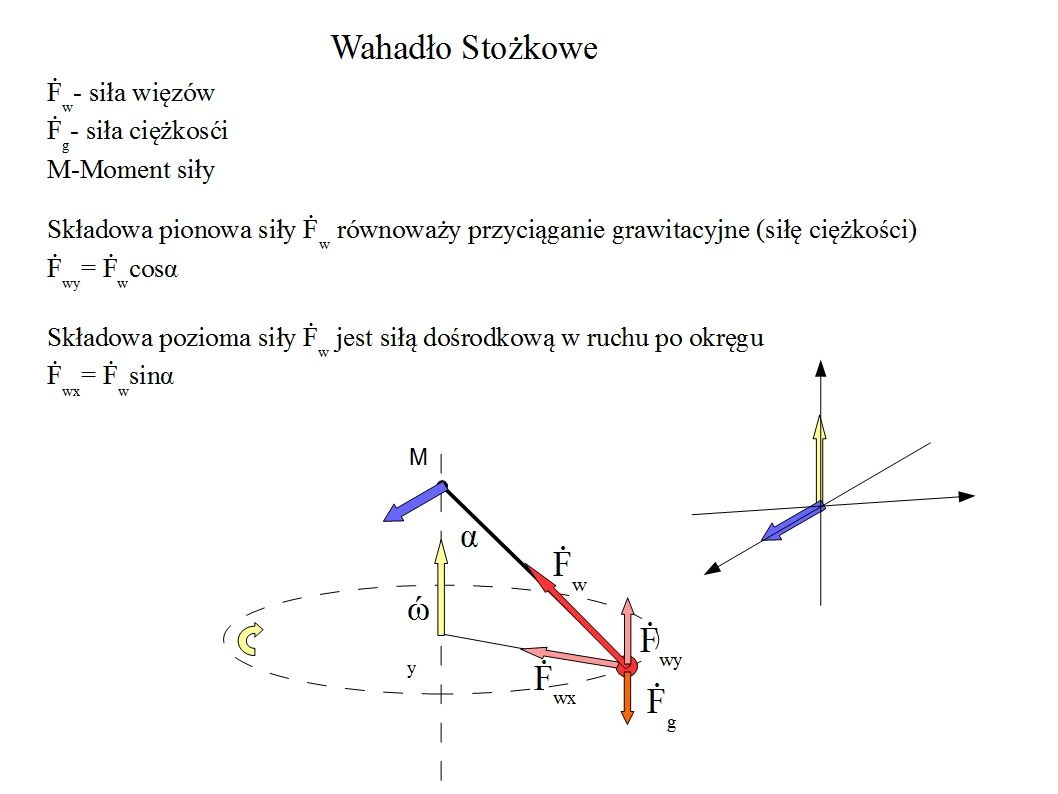
Czyli wzory na składowe sił więzów to
Fwx=Fwsinα (3)
Fwy=Fwcosα
I na jego podstawie wyszedł mi następujący schemat wektorów.
I tu mamy pierwszą jawną sprzeczność z wiedzą podręcznikową, według mojej hipotezy siła więzów jest zawsze prostopadła do wektora krętu L i jednocześnie nie musi być prostopadła do ω. Czy podręczniki mogą się mylić? Podręczniki są napisane przez ludzi więc nie są doskonałe, mam sporo argumentów za moim rozwiązaniem.
Najprostszym dowodem na błędność założenia że siła więzów jest zawsze prostopadła do ω, jest fakt że w takim przypadku dochodziło by do złamania zachowania prawa zachowania pędu. Jeżeli siła więzów była by zawsze prostopadła do ω to w przypadku kiedy L nie jest równoległe z ω, siła więzów będąca prostopadła do ω nie była by prostopadła do L, a znając wzór na dL/dt = r x F skutkować by to musiało zmianą wektora krętu w czasie i złamaniu prawa zachowania momentu pędu.
Hipoteza
Jeżeli wektor krętu L pozostaje stały w czasie oznacza to że dzieląc bryłę wzdłuż wektora L to wypadkowe sił więzów w obu częściach będą do wektora L prostopadłe.
Może słów kilka o pewnych ważnych szczegółach iloczynu wektorowego o którym można wyczytać w każdym podręczniku ale o nich się zapomina.
Iloczyn wektorowy to a x b = c gdzie |c|=absinα gdzie α jest to kąt między wektorami ab,
Jeżeli α jest różne od 90 stopni to iloczyn wektorowy nie jest działaniem przemiennym a x b = c to nie to samo co a = b x c.
Wektor ω jest pseudo wektorem utworzonym z iloczynu wektorowego iloczynu wektorowego ω= r x v, niestety przegapiono że stwierdzenie r = ω x v nie zawsze jest prawdziwe gdyż uzyskujemy w ten sposób jedynie składową wektora r który jest prostopadły do ω i v.
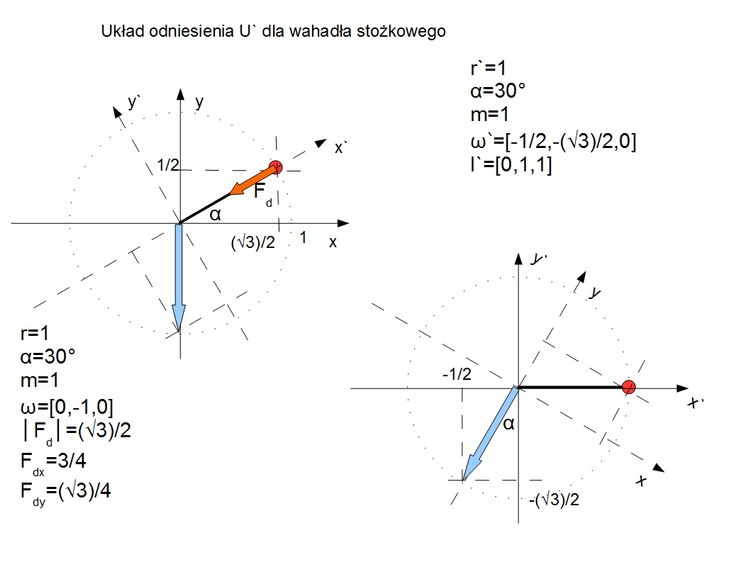
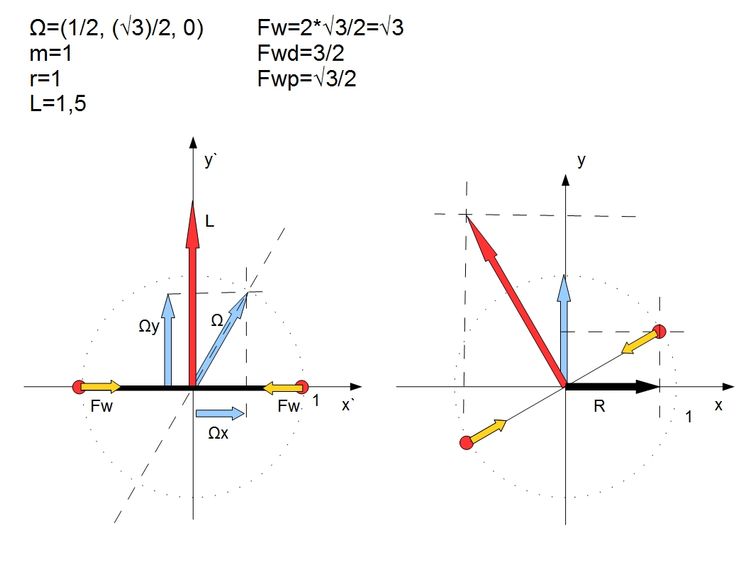
Przyjrzyjmy się teraz jak wygląda schemat wahadła stożkowego w inercjalnym i nieinercjalnym układzie odniesienia.
Wzór na silę dośrodkową Fw to
Fw=-mω^2 R (4)
przy czym R jest to składowa wektora promienia do środka ciężkości r będąca prostopadła do ω czyli w układzie nieinercjalnym BS
R=sinβr (5)
gdzie β jest kątem nachylenia ramienia do osi obrotu
Korzystając ze wzorów (3) i wstawiając do nich siłę wyliczoną ze wzoru (4) i korzystając z zależności (5) otrzymujemy (uwaga! na przedstawionych schematach kąty α nie są równe)
Fwx=-mω2sincosβr (6)
Fwx=-mω2sinsinβr
Rozpatrzmy przypadek gdy w układzie inercjalnym to wektor ω leży na jednej z oś głównych a w układzie nieinercjalnym na osi głównej leży wektor r. Wzór (6) jest w takim przypadku w układzie inercjalnym a po przejściu do układu nieinercjalnego to teraz wektor ω jest nachylony pod pewnym kątem i wzór (6) wygląda teraz następująco
Fwx=-msincosβω2r (7)
przy czym
ωx`=cosβω (8)
ωy`=sinβω
otrzymujemy więc wzór na składową poziomą siły więzów
Fwx=-mωx`ωy`r (9)
Tu trochę muszę naciągnąć bo jestem amatorem i brakuje trochę umiejętności by to zrobić profesjonalnie. Moment siły w bardzo dużym uproszczeniu to
M=rF (10)
Wyliczając moment siły na podstawie (9) mamy
M=-mr^2ωx`ωy`=Iωx`ωy` (11)
Osiągamy w ten sposób członu ze wzorów Eulera (2)
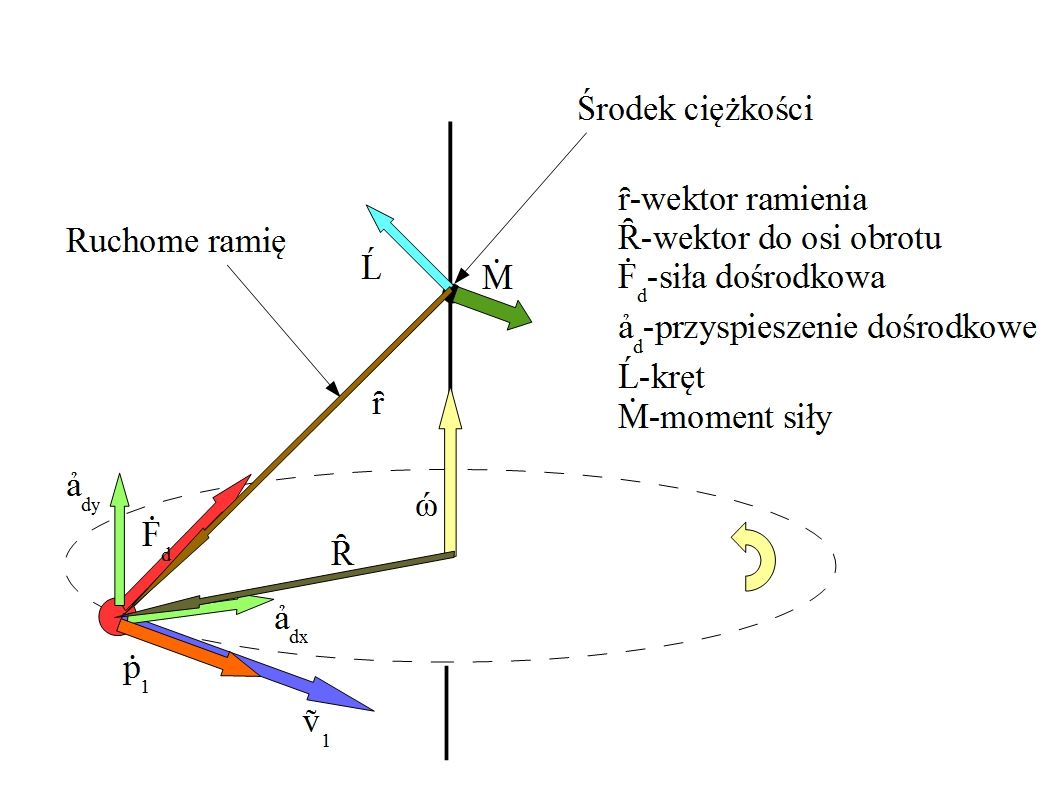
Patrząc na poniższy schemat gdzie momenty bezwładności ukazano jako masy umieszczone na dwóch prostopadłych do sobie ramionach przypuszczam że Momenty sił ze wzorów Eulera ukazują momenty sił wytwarzane przez takie właśnie ramiona.
Ixɛx = Iyωyωz – Izωzωy = Mx
Skąd się bierze ta różnica momentów sił? Rozpisałem już wstępny schemat sytuacji gdzie dwie masy umieszczone na równych i prostopadłych do siebie ramionach obracają się wokół osi ω.
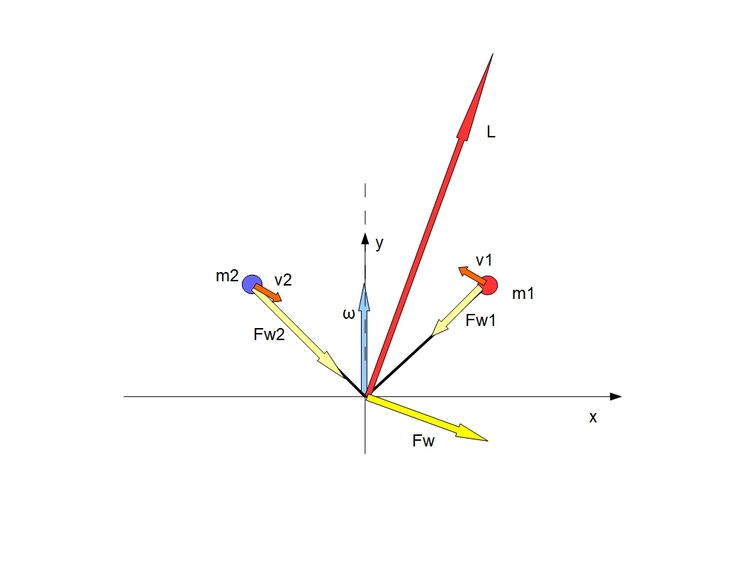
Pęd punktu to p=mv a siła dośrodkowa to Fw=-mω2 R czyli w sytuacji gdzie m1 jest różne od m2 momenty sił wywołane siłą więzów się nie równoważą i występuje moment siły kręcącej.
Wstępnie przedstawiłem mój kontrowersyjny pomysł i będę wdzięczny za sugestie czy też słowa krytyki które pozwolą dopracowywać ten pomysł.
Kod do animacji
from visual import *
osx=vector(1,0,0) #uklad bryly
osy=vector(0,1,0)
osz=vector(0,0,1)
print osx, osy, osz
masax=2
masay=1
masaz=0
rx=1
ry=1
rz=1
bryla=frame()
masa11=sphere(frame=bryla, pos = vector(1,0,0), radius =0.1, color = color.red)
masa12=sphere(frame=bryla, pos = vector(-1,0,0), radius =0.1, color = color.red)
masa21=sphere(frame=bryla, pos = vector(0,1,0), radius =0.1, color = color.blue)
masa22=sphere(frame=bryla, pos = vector(0,-1,0), radius =0.1, color = color.blue)
ramiex=cylinder(frame=bryla, pos = masa11.pos, radius =0.01, axis=masa12.pos-masa11.pos)
ramiey=cylinder(frame=bryla, pos = masa21.pos, radius =0.01, axis=masa22.pos-masa21.pos)
xy=0. #iloczyn sklalarny osi bryly
xz=0.
yz=0.
Ix=(masay*ry*ry)+(masaz*rz*rz) #moment bezwaladnosci
Iy=(masax*rx*rx)+(masaz*rz*rz)
Iz=(masay*ry*ry)+(masax*rx*rx)
TIxx=Ix #Tensor momentu bezwladnosci
TIyy=Iy
TIzz=Iz
TIxy=0
TIxz=0
TIyx=0
TIyz=0
TIzx=0
TIzy=0
print "momenty bezwladnosci", Ix,Iy,Iz
wx=0.0 #omega startow
wy=1.
wz=0.01
W=vector(wx,wy,wz)
wosx=vector(wx,0,0) #omega w ukladzie bryly
wosy=vector(0,wy,0)
wosz=vector(0,0,wz)
WBS=wosx+wosy+wosz
print "omega bryly", WBS
L=vector(Ix*wx,Iy*wy,Iz*wz)
Lpoczatek=L
print "kret", L
X=arrow(axis=vector(1,0,0), shaftwidth=0.01)
Y=arrow(axis=vector(0,1,0), shaftwidth=0.01)
Z=arrow(axis=vector(0,0,1), shaftwidth=0.01)
omega=arrow(axis=vector(wx,wy,wz), color= color.blue, shaftwidth=0.01)
kret=arrow(axis=vector(L.x,L.y,L.z), color= color.red, shaftwidth=0.01)
BSx=arrow(axis=vector(1,0,0), color= color.green, shaftwidth=0.01)
BSy=arrow(axis=vector(0,1,0), color= color.red, shaftwidth=0.01)
BSz=arrow(axis=vector(0,0,1), color= color.green, shaftwidth=0.01)
kropkaw=sphere(pos=vector(wx,wy,wz), radius=0.01, color= color.blue, make_trail=True)
kropkaL=sphere(pos=vector(L.x,L.y,L.z), radius=0.01, color= color.red, make_trail=True)
kropkaBSx=sphere(pos=vector(0,0,0), radius=0.01, color= color.green, make_trail=True)
t=0
dt=0.01
while t<20000:
rate(200)
#print mag(WBS)*dt
osx = rotate(osx, mag(WBS)*dt, WBS) #obrot ukladu bryly
osy = rotate(osy, mag(WBS)*dt, WBS)
osz = rotate(osz, mag(WBS)*dt, WBS)
bryla.rotate (angle=mag(WBS)*dt,axis=WBS)
#xy=(osx.x*osy.x)+(osx.y*osy.y)+(osx.z*osy.z) #iloczyn skalarny wektorow osi bryly
#xz=(osx.x*osz.x)+(osx.y*osz.y)+(osx.z*osz.z)
#yz=(osz.x*osy.x)+(osz.y*osy.y)+(osz.z*osy.z)
ex=((Iy-Iz)*wy*wz)/Ix #rowniania Eulera
ey=((Iz-Ix)*wz*wx)/Iy
ez=((Ix-Iy)*wx*wy)/Iz
wx=wx+ex*dt #wspolrzedne omegi
wy=wy+ey*dt
wz=wz+ez*dt
wosx=vector(osx.x,osx.y,osx.z) #spolzedne omegi w ukladzie bryly
wosx.mag=wx
wosy=vector(osy.x,osy.y,osy.z)
wosy.mag=wy
wosz=vector(osz.x,osz.y,osz.z)
wosz.mag=wz
WBS=wosx+wosy+wosz
omega.axis=vector(WBS.x,WBS.y,WBS.z)
#print t, WBS
TIxx=masax*(osx.y*osx.y+osx.z*osx.z)+masay*(osy.y*osy.y+osy.z*osy.z)+masaz*(osz.y*osz.y+osz.z*osz.z)
TIyy=masax*(osx.x*osx.x+osx.z*osx.z)+masay*(osy.x*osy.x+osy.z*osy.z)+masaz*(osz.x*osz.x+osz.z*osz.z)
TIzz=masay*(osy.y*osy.y+osy.x*osy.x)+masax*(osx.y*osx.y+osx.x*osx.x)+masaz*(osz.y*osz.y+osz.x*osz.x)
TIxy=masax*osx.x*osx.y+masay*osy.x*osy.y+masaz*osz.x*osz.y
TIxz=masax*osx.x*osx.z+masay*osy.x*osy.z+masaz*osz.x*osz.z
TIyx=masax*osx.x*osx.y+masay*osy.x*osy.y+masaz*osz.x*osz.y
TIyz=masax*osx.z*osx.y+masay*osy.z*osy.y+masaz*osz.z*osz.y
TIzx=masax*osx.x*osx.z+masay*osy.x*osy.z+masaz*osz.x*osz.z
TIzy=masax*osx.z*osx.y+masay*osy.z*osy.y+masaz*osz.z*osz.y
L=vector((WBS.x*TIxx-WBS.y*TIxy-WBS.z*TIxz),(-WBS.x*TIyx+WBS.y*TIyy-WBS.z*TIyz),(-WBS.x*TIzx-WBS.y*TIzy+WBS.z*TIzz))
print t, Lpoczatek-L
kret.axis=vector(L.x,L.y,L.z)
kropkaBSx.pos=vector(osy.x,osy.y,osy.z)
kropkaL.pos=vector(L.x,L.y,L.z)
#BSy.axis=vector(osy.x,osy.y,osy.z)
#BSz.axis=vector(osz.x,osz.y,osz.z)
#BSx.axis=vector(osx.x,osx.y,osx.z)
# print t, osx, mag(W)
t=t+1





Komentarze
Pokaż komentarze (28)