
Podstawy systemów rejestracji w samolocie
Systemy rejestracji parametrów lotu, tj. MSRP-64 i dźwięku MARS-BM w samolocie TU154M mają elementy wspólne. Blokowy schemat pokazujący elementy składowe systemów przedstawiono na rysunku 1.
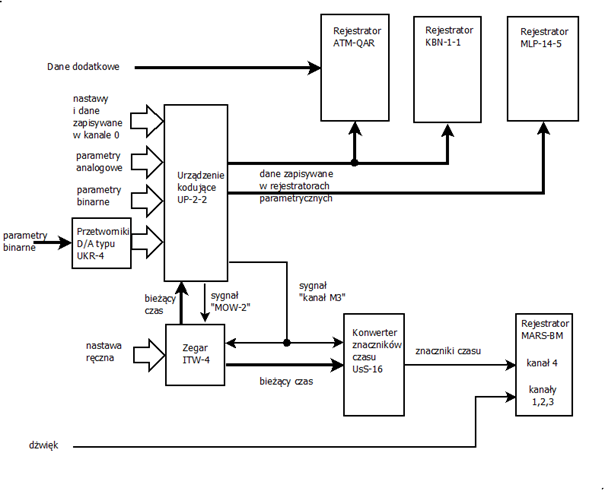
Rysunek 1. Schemat blokowy systemów MSRP-64 i MARS-BM
Elementem wspólnym obu systemów w samolocie TU154M jest urządzenie UP-2-2, którego schemat blokowy przedstawiono na rysunku 2. Urządzenie to jest centralną częścią systemu zbierania parametrów lotu samolotu MSRP-64 oraz dostarcza sygnału zegarowego dla czwartego kanału rejestratora dźwięku MARS-BM.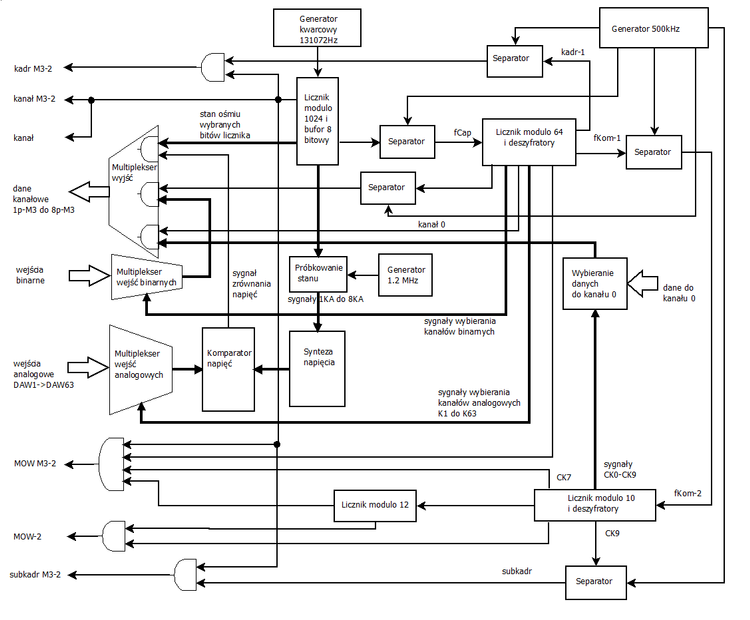 Rysunek 2. Schemat blokowy urządzenia UP-2-2
Rysunek 2. Schemat blokowy urządzenia UP-2-2
Urządzenie UP-2-2 zawiera układy cyfrowe i analogowe niezbędne do wybrania kanałów pomiarowych FDR oraz dokonania pomiarów napięć w poszczególnych kanałach. Podstawę funkcjonowania urządzenia stanowi generator kwarcowy dostarczający sygnału o częstotliwości 131072 Hz, który to sygnał jest poddawany podziałowi częstotliwości w kolejnych licznikach pokazanych na rysunku.
Liczniki wchodzące w skład urządzenia zbudowane są z asynchronicznych przerzutników typu T, które złożono z indywidualnych bramek jak na rysunku 3. Każdy taki przerzutnik dokonuje podziału częstotliwości przez 2, z czego wynika, że np. aby dokonać podziału przez 64 konieczne jest użycie 6 przerzutników. W przypadku liczników modulo 10 i 12 wykorzystano dodatkowe deszyfracje i sprzężenia , które zapewniają uzyskanie potrzebnego stopnia podziału.
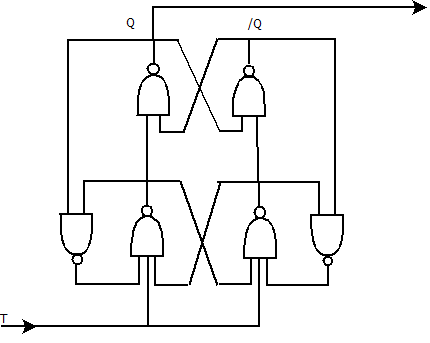
Rysunek 3. Schemat logiczny przerzutników stosowanych w licznikach
W konstrukcji urządzenia UP-2-2 zwracają uwagę separatory sygnałów przekazywanych między kolejnymi licznikami oraz dodatkowe generatory częstotliwości 500 kHz i 1.2MHz. Uproszczony schemat tych separatorów pokazano na rysunku 4. Impuls wejściowy doprowadzony do separatora przeniknie na jego wyjście tylko wtedy, gdy trwa dużej niż określa to stała czasowa C*(R1+R2).
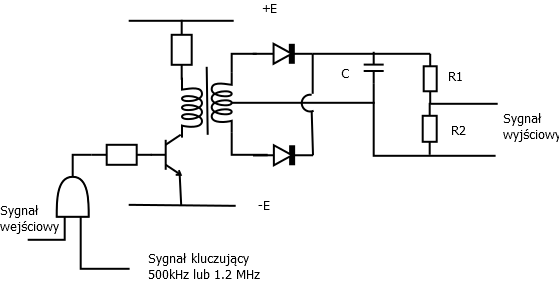
Rysunek 4. Uproszczony schemat separatorów sygnałów przesyłanych między licznikami
Stosowanie takich układów nie mieści się w kanonach klasycznej techniki cyfrowej - należy je widzieć jako zastosowanie techniki impulsowej w celu eliminacji zakłóceń powstających w układach cyfrowych. Można się domyślać, że zastosowano je w urządzeniu aby ograniczyć przenikanie krótkich impulsów powstających w wyniku zakłócenia normalnej pracy liczników. Ich obecność oznacza, że konstruktorzy urządzenia liczyli się z możliwością powstania takich impulsów. Separatory wbudowano jednak tylko na połączeniach kolejnych liczników, tymczasem dokładnie taki sam problem może powstać na połączeniach między przerzutnikami tworzącymi te liczniki.
Gdyby impulsy zakłócające normalne odliczanie powstawały wewnątrz liczników, to miałoby to pewne skutki w zakresie funkcjonowania całego urządzenia, różne w zależności od licznika. Zakłócenia w pierwszym stopniu podziału częstotliwości 131072 Hz mogłyby spowodować nieprawidłowe konwersje sygnału analogowego na cyfrowy. Zakłócenia w drugim stopniu spowodowałyby mylenie kanałów pomiarowych i na przykład zakończenie ramki pomiarowej bez obiegu wszystkich 64 kanałów. Zakłócenia w stopniu trzecim spowodowałyby podawanie nieprawidłowych wartości do zapisu w kanale 0. Zakłócenia w stopniu 4 mogłyby spowodować nieprawidłowe generowanie sygnałów odmierzających subkadry.
Nie wiem, czy omawiane tu efekty dały się zaobserwować w danych zapisywanych przez rejestratory FDR i ewentualnie w której fazie lotu do Smoleńska. Gdyby jednak tak było, to należy je przyjąć bez tworzenia wokół tego faktu sensacji, bo jak wynika z dokumentacji UP-2-2, możliwość taka była przewidywana przez konstruktorów systemu. Starali się ją ograniczyć, ale to nie oznacza, że wyeliminowali ją całkowicie.
Nagrywanie scieżki IV rejestratora MARS-BM
Sygnał zapisywany w kanale IV rejestratora MARS-BM pochodzi z urządzenia UsS-16, którego blokowy schemat przedstawiono na rysunku 5. Z zewnątrz do urządzenia doprowadzone są dwa rodzaje sygnałów:
- sygnał „kanał M3” z urządzania UP-2-2.
- kod bieżącego czasu z urządzenia ITW-4.
Podstawę działania urządzenia stanowi licznik modulo 64, który jest zbudowany podobnie jak urządzenie UP-2-2, z asynchronicznych przerzutników typu T.
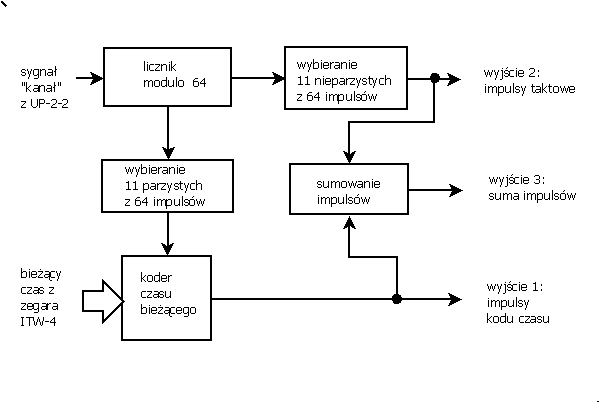
Rysunek 5. Blokowy schemat urządzenia UsS-16
W urządzeniu nie zastosowano żadnych separatorów impulsów między ogniwami licznika ani przy deszyfracji jego stanów. Dokonując odczytów sygnałów z kanału czwartego można sprawdzić, czy bez tych separatorów liczniki cały czas pracowały poprawnie. Według wyjaśnień zawartych w raporcie A. Artymowicza dla NPW, w odczytywanym sygnale znaleziono wiele przypadków błędnych sekwencji impulsów, co świadczy o tym, że czasami następowały niekontrolowane przeskoki między stanami licznika w urządzeniu UsS-16.
Przypadki złego odliczenia odstępów czasowych wynikające z przeskakiwania stanów licznika w urządzeniu UsS-16 należy odróżniać od problemów wynikłych z zagniecenia taśmy magnetycznej lub jej uszkodzenia. Nie należy mylić ich także z problemami pojawiającymi się na końcach taśmy w chwili zmiany kierunku przewijania. Jak widać na rysunku 6, sygnały zapiszą się prawidłowo na taśmie tylko w tych miejscach, które uprzednio przeszły pod głowicą kasującą. Przy zwrocie taśmy zawsze pojawia się odcinek między drugą głowicą kasującą a głowicą nagrywającą, który nie zostanie wykasowany. Na odcinku tym należy się spodziewać przypadkowej „sieczki” impulsów zapisanych tam od początku eksploatacji taśmy i nigdy potem nie wykasowanych.

Rysunek 6. Problem ze skasowaniem sygnałów przy zwrocie kierunku przesuwu taśmy.






Komentarze
Pokaż komentarze (5)