
Uwaga!!!
Po analizie zgłoszonych uwag dochodzę wniosku, że przedstawiona w notce diagnoza może być błędna. Prawdopodobnie to nie blokada mechaniczna spowodowała zatrzymanie wskazań przechylenia na wartości 66 stopni ale zanik jednej z faz na szynie zasilającej urządzania. Czytelników proszę o zapoznanie się z dyskusją.
Oryginalny tekst notki.
W raporcie MAK i KBWLLP zamieszczane są wykresy przechylenia samolotu, które pokazują, że tuż przed uderzeniem o ziemię maksymalna zmierzona wartość tego przechylenia wynosiła około 66 stopni. Widać to także na poniższym rysunku 1. Ograniczenie pomiaru prędkości przechylania jest zgodne z dokumentacją urządzenia DUSU1-18AS (ДУСУ1-18АС), które wykonywało ten pomiar. Ograniczenie kąta przechyłu jest niezgodne z dokumentacją zaangażowanych urządzeń pomiarowych. 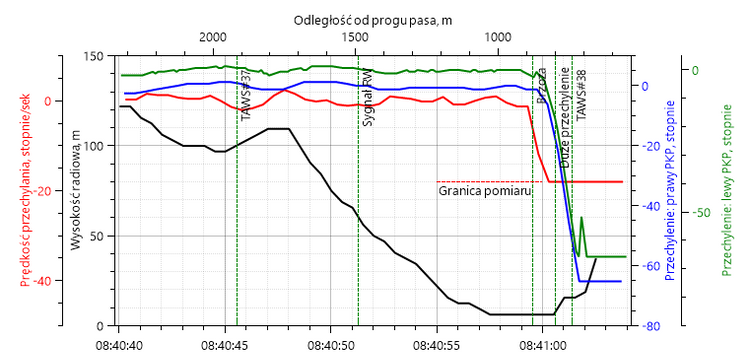 Rysunek 1. Zmiany przechylenia samolotu
Rysunek 1. Zmiany przechylenia samolotu
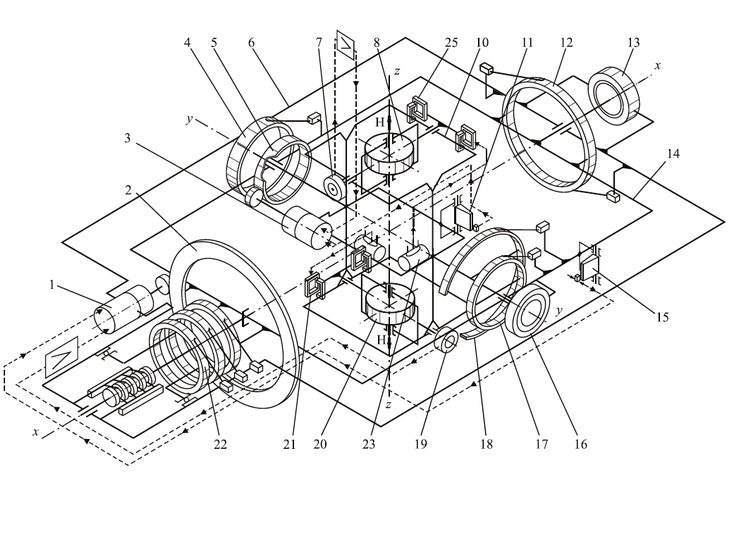
Na rysunku 2 przedstawiono ciąg urządzeń, które brały w pomiarach. Liczba zaangażowanych pośredników elektromechanicznych (PKP-1 i BSU-1) dla sygnału przechylenia tłumaczy dlaczego zmiany prędkości przechylenia na wykresie 1 zdają się wyprzedzać zmiany kąta przechylenia. Wg dostępnych dokumentacji żyroskop MGW-1SK (МГВ-1СК) posiada zdolność wykonywania pomiarów przechylenia wokół osi X w zakresie -+180 stopni, przetwornik BSU-1 (БСУ-1) wprowadza ograniczenie do około 83 stopni, przyrząd PKP-1 (ПКП-1) zaczyna zawodzić dopiero przy wartości ponad 90 stopni. Powstaje zatem pytanie, gdzie tak naprawdę zadziałał mechanizm, który spowodował ograniczenie pomiaru do wartości około 66 stopni?

Rysunek 2. Ciąg urządzeń pomiarowych i rejestracyjnych parametru „kąt przechylenia”.
W niniejszej notce chciałbym pokazać, że nieprawdziwa jest informacja o tym, że żyroskopy MGW-1SK dopuszczają obrót wokół osi podłużnej samolotu w zakresie -+180 stopni. Wg mnie ten kąt jest ograniczony do zakresu -+66 stopni i z tego wynikają ograniczenia zakresu pomiarowego widoczne na wykresach. Aby to zrozumieć trzeba się zapoznać z budową żyroskopów.
W samolocie TU154M znajdują się trzy żyroskopy typu MGW-1SK. Żyroskop nr 1 służy do kontroli ustawienia anten systemu radiolokacyjnego „Groza”. Żyroskop nr 2 podaje kąt pochylenia i przechylenia do urządzenia PKP-1 drugiego pilota. Żyroskop nr 3 podaje kąt przechylenia i pochylenia do urządzenia PKP-1 pierwszego pilota. Z żyroskopu nr 3 pochodzi także zapis kąta pochylenia zapisywany przez rejestratory systemu MSRP-64.
Budowa żyroskopów MGW-1SK jest przedstawiona w dokumencie [1]. Prawdopodobnie zamieszczone tam rysunki wiernie oddają budowę urządzenia, jest jednak problem z tym, że podawane opisy są niezgodne z zamieszczonym schematem urządzenia. Ponadto dokument podaje wiele szczegółów budowy i funkcjonowania żyroskopów, nieistotnych dla rozważanego problemu. Biorąc to pod uwagę w dalszym ciągu będę się posługiwał rysunkiem pokazującym uproszczony schemat kinematyki, wspólny dla urządzeń: MGW-1C lub MGW-1SU i MGW-1SK. Rysunek jest nieco uproszczony w stosunku do tego, co jest w dokumencie [1], ale dzięki temu łatwiej jest pokazać istotę zagadnienia. Kinematyka wszystkich modeli żyroskopów jest taka sama, wg dostępnych w Internecie informacji różnice dotyczą sprzężeń elektrycznych z otoczeniem.
Schemat kinematyki modelowego żyroskop przedstawia rysunek 3. W niniejszej rozważaniach istotne są następujące elementy:
- korpus 6 związany kinematycznie z konstrukcją nośną samolotu;
- rama zewnętrzna 14 do kontroli przechylenia;
- rama wewnętrzna 10 do kontroli pochylenia;
- żyroskop 8;
- żyroskop 20;
- potencjometr 7 mierzący precesję żyroskopu 8;
- potencjometr 19 mierzący precesję żyroskopu 20;
- silnik 1 obracający ramę 14 wokół osi X;
- silnik 3 obracający ramę 10 wokół osi Y ;
- resolwery (transformatory sinus-cosinus) 13 i 16 przekazujące pomiary kątów pochylenia i przechylenia do urządzeń PKP-1.
System żyroskopowy MGW-1SK jest zamontowany tak, że oś X jest skierowana wzdłuż osi podłużnej samolotu, a oś Y wzdłuż osi poprzecznej.
W pewnym uproszczeniu działanie systemu żyroskopowego polega na utrzymywaniu wewnętrznej ramy 10 w pozycji poziomej i dokonywaniu pomiaru odchylenia ramy 10 w stosunku do ramy 14, co wyznacza kąt pochylenia oraz ramy 14 w stosunku do korpusu 6, co wyznacza kąt przechylenia samolotu. Do utrzymania pozycji poziomej ramy 10 wykorzystywane są dwa żyroskopy 8 i 20, które mają momenty pędu równe co do modułu, ale skierowane w przeciwnych kierunkach. Żyroskop 20 jest elementem, którego nieskompensowana precesja pod wpływem siły działającej wokół osi X powoduje odchylenie ramy 10 wokół osi Y, a żyroskop 8 elementem, którego precesja pod wpływem siły działającej wokół osi Y powoduje odchylenie ramy 10 wokół osi X. Jest to model uproszczony, bo w rzeczywistości sprzężenie między żyroskopami jest wykonane z dopuszczeniem pewnego luzu – służą do tego dodatkowe osie obrotu X1 i Y1 oraz powiązane siłowniki magnetyczne i ograniczniki mechaniczne.
 Rysunek 3. Schemat kinematyki żyroskopu MGW
Rysunek 3. Schemat kinematyki żyroskopu MGW
Podczas lotu do Smoleńska żyroskopy działy w opisany sposób dopóki kąt przechylenia nie przekroczył 66 stopni. W chwili, gdy ta wartość została osiągnięta, zadziałał jakiś zaczep mechaniczny zawiązany z korpusem 6, który zaczął przechylać ramę 14 wokół osi X, a ta z kolei wewnętrzną ramę 10. Jak widać na rysunku 3, wzrost rejestrowanego kąta przechylenia został zatrzymany na wartości około 66 stopni. Wymuszony obrót ramy 10 wokół osi X spowodował precesję żyroskopu 20 wymuszając jego obrót wokół osi Y1. Sterowany z potencjometrów 19 silnik 1 nie był w stanie przełamać nacisku zaczepu na ramę 14, co spowodowało, że nie udało się zatrzymać precesji i po chwili cała rama 10 zaczęła się obracać także wokół osi Y. Rezultatem było to, że zaczął się zmieniać kąt pomiędzy ramą 10 i ramą 14 po osi Y, co zarejestrowało się jako widoczne na końcu (patrz rysunek 4) zmniejszanie kąta pochylenia samolotu.
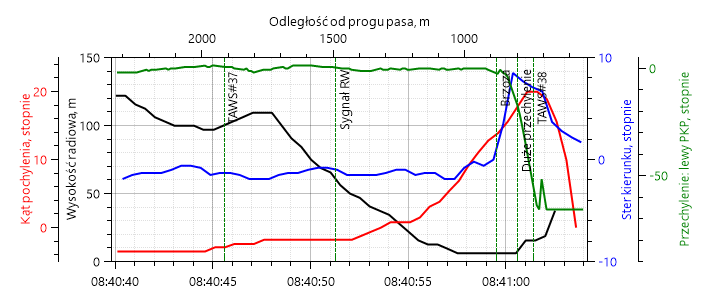
Rysunek 4. Zmiany mierzonych wartości przechylenia i pochylenia
Należy pamiętać, że w czasie gdy samolot był przechylony o kąt bliski 90 stopni, prawie żadna z sił aerodynamicznych od płaszczyzn sterowych nie działała w kierunku góra-dół, w jakim mierzone było pochylenie. Jedyną siłą, która była skierowana w ten sposób mogła być siła wynikająca z ustawienia steru kierunku. Z wykresu na rysunku 4 wynika jednak, że w tym czasie kąt steru kierunku schodził do wartości bliskich zeru, co oznacza, że ten ster miał malejący wpływ na pochylenie samolotu, jeśli w ogóle jakiś miał. Jak z tego widać, zapisywane zmiany kąta pochylenia to był tylko błąd pomiarowy wynikający z konstrukcji żyroskopów.
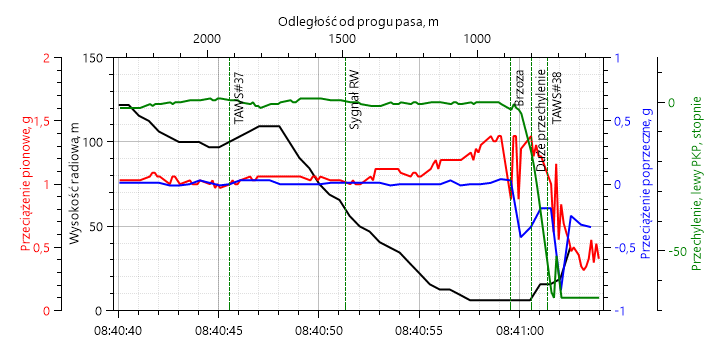
Rysunek 5. Wpływ zdarzenia TAWS#38 na pomiary kąta przechylenia.
Warto jeszcze przeanalizować rysunek 5, który uwydatnia to, co stało się w chwili zdarzenia TAWS#38. Uderzenie podwozia samolotu o jakąś przeszkodę (drzewo?) spowodowało powstanie siły, której składowe zadziałały wzdłuż wszystkich osi samolotu. Wynikające stąd przyspieszenia wzdłuż osi poprzecznej i pionowej są rejestrowane i zostały pokazane na wykresie. Wiadomo jednak, że w tym zderzeniu zostały przełamane elementy konstrukcyjne prawej goleni podwozia samolotu, co oznacza, że musiała także być niezerowa składowa działająca wzdłuż kierunku lotu samolotu. Wynikająca stąd składowa przyspieszenia nie podlega rejestracji w systemie MSRP-64. Kierunek działania tej składowej pokrywał się z orientacją osi X żyroskopu.
Siła działająca wzdłuż osi X spowodowała precesję żyroskopu 8, tj. jego obrót jego osi Z po osi X1. Po przekroczeniu granicznego odchylenia o około 2.5 stopnia spowodowało to najpierw obrót ramy 10, a potem także ramy 14 wokół osi X i w rezultacie pojawiło się zmniejszenie kąta przechylenia, widoczne na wykresie w momencie 8:41:02 – rama 14 „uciekła” przed naciskającym zaczepem związanym z korpusem 6. Równocześnie jednak zgodnie z dokumentacją urządzeń, uruchomiło to proces kompensacji realizowany przez silnik 3. Reakcja silnika 3 spowodowała powstanie momentu kompensacyjnego dla precesji i jej zatrzymanie. W chwili, gdy moment siły wynikający ze zderzenia znikł, silnik 3 wycofał ramę 10 do poprzedniej pozycji, a wraz z nią spowodował obrót ramy 14. Dodatkowo obracający się z samolotem zaczep związany z korpusem 6 znowu dogonił ramę 14. W związku z tym mierzony kąt przechylenia powrócił do maksymalnej wartości około 66 stopni.
Opisywanego efektu nie widać na wykresie przechylenia z prawego PKP-1, gdyż wszystkie zmiany zakończyły się w czasie krótszym niż 0.5 sekundy, kiedy dokonywane były kolejne pomiary. W przypadku lewego PKP-1 pomiary dokonywane były co 0.125 sekundy i dlatego zmiany stały się widoczne.
Jak widać mamy zarejestrowane trzy zjawiska fizyczne, które w sumie pozwalają na stwierdzenie, że maksymalny stopień odchylenia ramy 14 w stosunku do korpusu nie wynosił -+180 stopni, a tylko -+66 stopni. Z tego właśnie wynikł niezgodny z prawami fizyki zapis parametru „przechylenie” w ostatnich sekundach lotu TU154M PLF101. Zapis parametru „pochylenie” jest zgodny z prawami fizyki, tyle że w ostatnich 3 sekundach nie dokumentuje pochylenia samolotu, ale elementu odniesienia w żyroskopie.
W niniejszej prezentacji posłużono się rysunkiem innego modelu żyroskopu niż zastosowano w samolocie, ale jak można przeczytać w dostępnych dokumentach kinematyka obu modeli jest dokładnie taka sama. Dzięki temu także dokument [2] jest przydatny w do wyjaśnienia pracy tego typu urządzeń. Pewne wyjaśnienie stosowanej technologii zawarte jest też w polskich materiałach dydaktycznych [3].
Bibliografia
[1] СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САУ-154-2
http://www.aviadocs.net/RLE/Tu-154M/CD2_RLYE/ABSU/Tu-154M_ABSU_ch2.pdf
[2] СИСТЕМЫ ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ
http://kafpson.kpi.ua/Arhiv/Bondar/lr_sois.pdf
[3] Zastosowanie żyroskopów w nawigacji http://www.kdm.p.lodz.pl/wyklady/instrukcje/Cwiczena%20laboratoryjne%20z%20mechaniki%20-%20cw9-.pdf






Komentarze
Pokaż komentarze (24)